2023
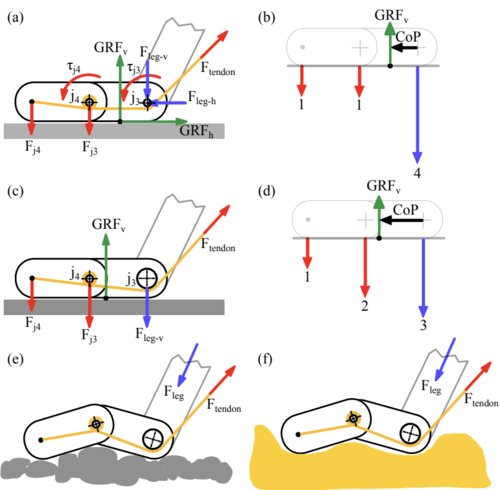
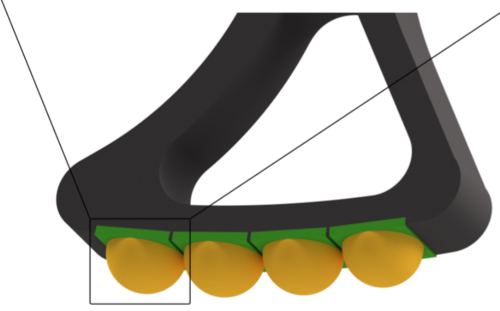
Multi-segmented Adaptive Feet for Versatile Legged Locomotion in Natural Terrain
(Outstanding locomotion paper award)
Chatterjee, A., Mo, A., Kiss, B., Goenen, E. C., Badri-Spröwitz, A.
2023 IEEE International Conference on Robotics and Automation (ICRA 2023), pages: 1162-1169 , IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA), June 2023 (conference)
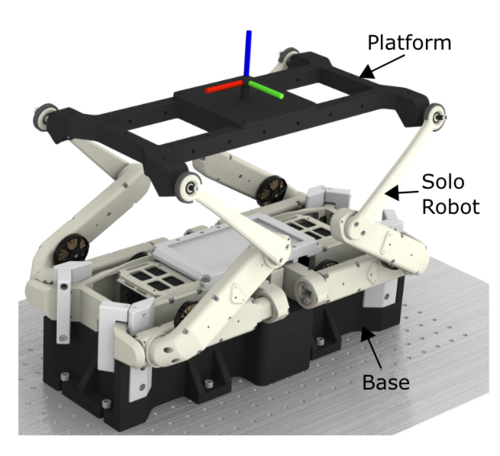
Upside down: affordable high-performance motion platform
Pradhan, N. M. S., Frank, P., Mo, A., Badri-Spröwitz, A.
arXiv, 2023 (conference) Accepted
2022

Mechanical Design, Development and Testing of Bioinspired Legged Robots for Dynamic Locomotion
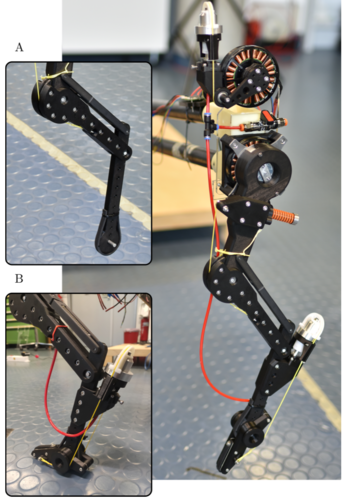
Diaphragm Ankle Actuation for Efficient Series Elastic Legged Robot Hopping
Bolignari, M., Mo, A., Fontana, M., Badri-Spröwitz, A.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, IROS2022, October 2022 (conference) In press
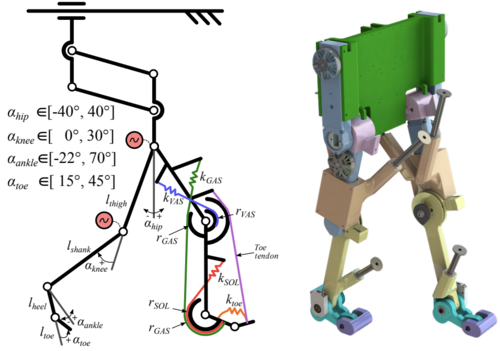
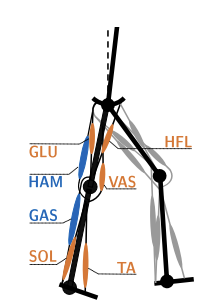
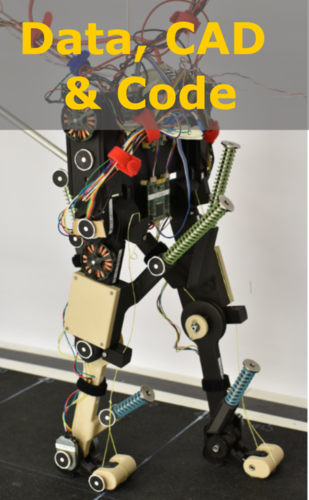
Gastrocnemius and Power Amplifier Soleus Spring-Tendons Achieve Fast Human-like Walking in a Bipedal Robot
Kiss, B., Gonen, E. C., Mo, A., Buchmann, A., Renjewski, D., Badri-Spröwitz, A.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, IROS2022, October 2022 (conference) In press
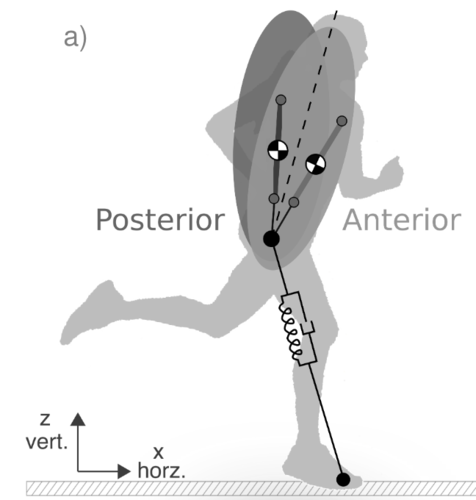
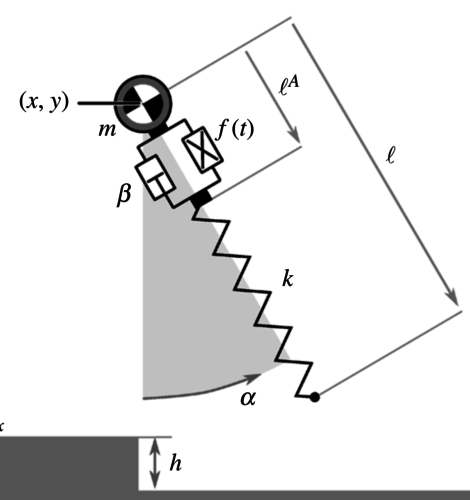
Power to the springs: Passive elements are sufficient to drive push-off in human walking
Buchmann, A., Kiss, B., Badri-Spröwitz, A., Renjewski, D.
In Robotics in Natural Settings , pages: 21-32, Lecture Notes in Networks and Systems, 530, (Editors: Cascalho, José M. and Tokhi, Mohammad Osman and Silva, Manuel F. and Mendes, Armando and Goher, Khaled and Funk, Matthias), Springer, Cham, 25th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machine (CLAWAR 2022), August 2022 (inproceedings)
2021
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
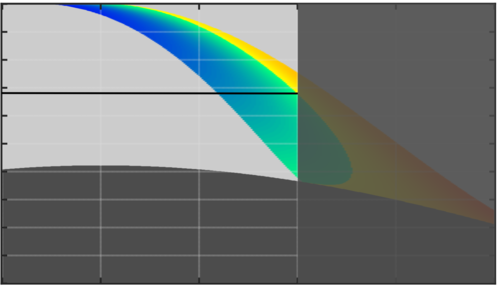
A little damping goes a long way
Heim, S., Millard, M., Mouel, C. L., Badri-Spröwitz, A.
In Integrative and Comparative Biology, 61(Supplement 1):E367-E367, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021) , March 2021 (inproceedings)
Effects of tendon-network mechanisms on avian terrestrial locomotion
Contreras, F. B., Daley, M., Badri-Spröwitz, A.
In Integrative and Comparative Biology, 61(Supplement 1):E89-E90, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Developing a mechanical model for intraspinal mechanosensing in avians
Mo, A., Kamska, V., Contreras, F. B., Daley, M., Badri-Spröwitz, A.
In Integrative and Comparative Biology , 61(Supplement 1):E618-E619, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Associating functional morphology of the lumbosacral organ and locomotion modalities in avians
Kamska, V., Contreras, F. B., Daley, M., Badri-Spröwitz, A.
In Integrative and Comparative Biology, 61(Supplement 1):E437-E437, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
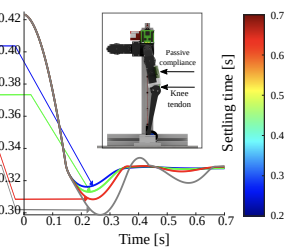
Tackling sensorimotor delays and low control update frequencies during drop impacts with hybrid parallel leg compliance
Ashtiani, M. S., Sarvestani, A. A., Badri-Spröwitz, A.
The 9.5th international symposium on Adaptive Motion of Animals and Machines. Ottawa,Canada (Virtual Platform). 2021-06-22/25. Adaptive Motion of Animals and Machines Organizing Committee., pages: 3, Adaptive Motion of Animals and Machines Organizing Committee, Adaptive Motion of Animals and Machines, 2021 (conference)
2020
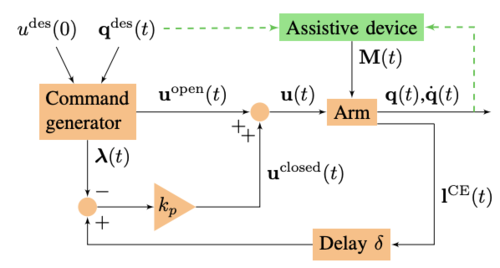
Simulating the response of a neuro-musculoskeletal model to assistive forces: implications for the design of wearables compensating for motor control deficits
Stollenmaier, K., Rist, I., Izzi, F., Haeufle, D. F.
In 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob 2020), pages: 779-784, IEEE, Piscataway, NJ, 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob 2020), October 2020 (inproceedings)
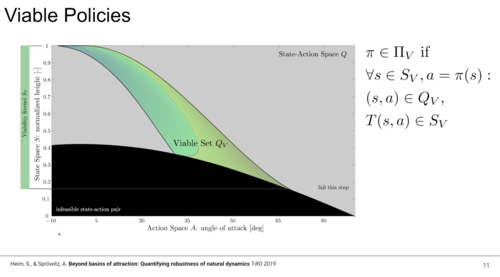
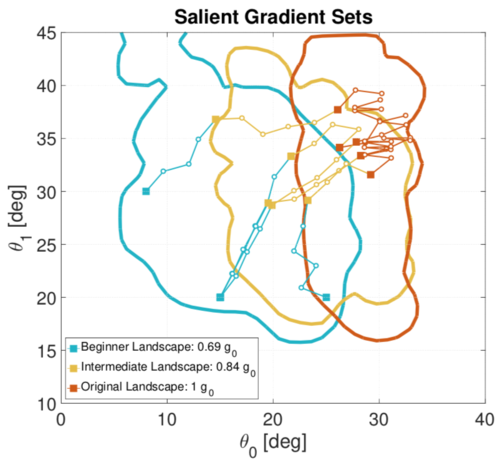
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Heim, S., Badri-Spröwitz, A.
May 2020 (talk)
FootTile: a Rugged Foot Sensor for Force and Center of Pressure Sensing in Soft Terrain
Ruppert, F., Badri-Spröwitz, A.
In 2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 4810-4816, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020) , 2020 (inproceedings)
Viability in State-Action Space. Connecting Morphology, Control, and Learning
2019
Trunk Pitch Oscillations for Joint Load Redistribution in Humans and Humanoid Robots
Drama, Ö., Badri-Spröwitz, A.
Proceedings of 2019 IEEE-RAS 19th International Conference on Humanoid Robots, pages: 531-536, IEEE, Humanoids, October 2019 (conference)
The positive side of damping
Heim, S., Millard, M., Le Mouel, C., Sproewitz, A.
Proceedings of AMAM, The 9th International Symposium on Adaptive Motion of Animals and Machines, August 2019 (conference)
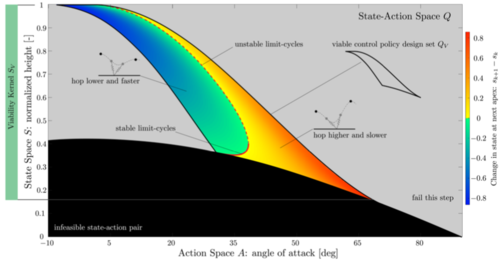
Quantifying the Robustness of Natural Dynamics: a Viability Approach
Heim, S., Sproewitz, A.
Proceedings of Dynamic Walking , Dynamic Walking , 2019 (conference)
2018
Learning from Outside the Viability Kernel: Why we Should Build Robots that can Fail with Grace
Heim, S., Sproewitz, A.
Proceedings of SIMPAR 2018, pages: 55-61, IEEE, 2018 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), May 2018 (conference)
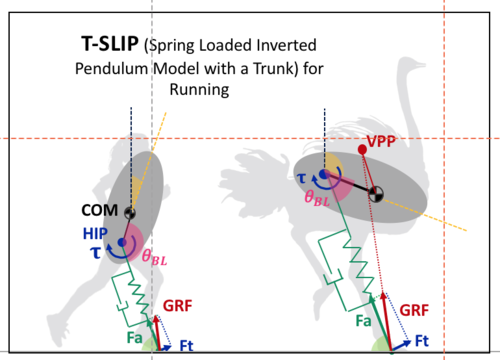
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Drama, Ö.
Dynamic Walking Conference, May 2018 (talk)
Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware
Heim, S., Ruppert, F., Sarvestani, A., Sproewitz, A.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018, pages: 5076-5081, IEEE, International Conference on Robotics and Automation, May 2018 (inproceedings)
2017
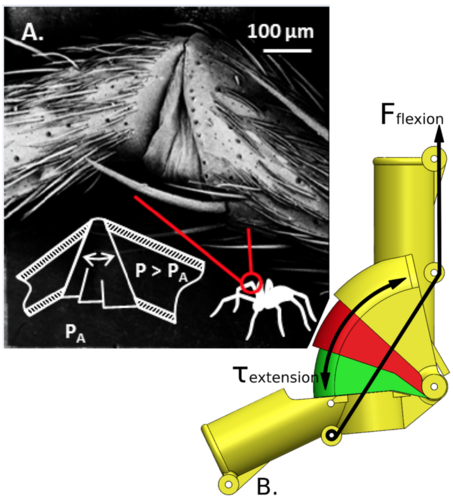
Scalable Pneumatic and Tendon Driven Robotic Joint Inspired by Jumping Spiders
Sproewitz, A., Göttler, C., Sinha, A., Caer, C., Öztekin, M. U., Petersen, K., Sitti, M.
In Proceedings 2017 IEEE International Conference on Robotics and Automation (ICRA), pages: 64-70, IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
Linking Mechanics and Learning
Heim, S., Grimminger, F., Drama, Ö., Spröwitz, A.
In Proceedings of Dynamic Walking 2017, 2017 (inproceedings)
Is Growing Good for Learning?
Heim, S., Spröwitz, A.
Proceedings of the 8th International Symposium on Adaptive Motion of Animals and Machines AMAM2017, 2017 (conference)
2016
On designing an active tail for body-pitch control in legged robots via decoupling of control objectives
Heim, S. W., Ajallooeian, M., Eckert, P., Vespignani, M., Ijspeert, A.
In ASSISTIVE ROBOTICS: Proceedings of the 18th International Conference on CLAWAR 2015, pages: 256-264, 2016 (inproceedings)
2015
Comparing the effect of different spine and leg designs for a small bounding quadruped robot
Eckert, P., Spröwitz, A., Witte, H., Ijspeert, A. J.
In Proceedings of ICRA, pages: 3128-3133, Seattle, Washington, USA, 2015 (inproceedings)
2014
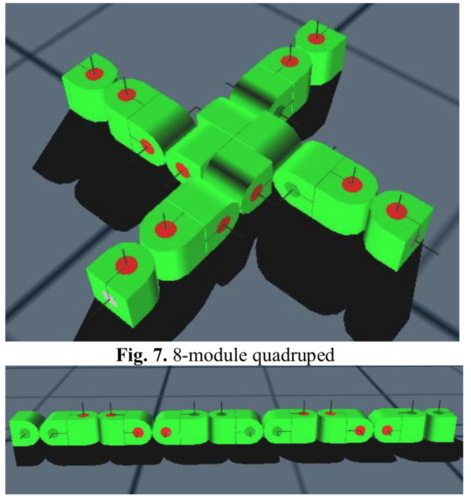
Automatic Generation of Reduced CPG Control Networks for Locomotion of Arbitrary Modular Robot Structures
Bonardi, S., Vespignani, M., Möckel, R., Van den Kieboom, J., Pouya, S., Spröwitz, A., Ijspeert, A.
In Proceedings of Robotics: Science and Systems, University of California, Barkeley, 2014 (inproceedings)
2013
Benefits of an active spine supported bounding locomotion with a small compliant quadruped robot
Khoramshahi, M., Spröwitz, A., Tuleu, A., Ahmadabadi, M. N., Ijspeert, A. J.
In Robotics and Automation (ICRA), 2013 IEEE International Conference on, pages: 3329-3334, May 2013 (inproceedings)
Central pattern generators augmented with virtual model control for quadruped rough terrain locomotion
Ajallooeian, M., Pouya, S., Spröwitz, A., Ijspeert, A. J.
In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), pages: 3321-3328, IEEE, Karlsruhe, 2013 (inproceedings)
Gait Optimization for Roombots Modular Robots - Matching Simulation and Reality
Möckel, R., Yura, N. P., The Nguyen, A., Vespignani, M., Bonardi, S., Pouya, S., Spröwitz, A., van den Kieboom, J., Wilhelm, F., Ijspeert, A. J.
In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages: 3265-3272, IEEE, Tokyo, 2013 (inproceedings)
Modular Control of Limit Cycle Locomotion over Unperceived Rough Terrain
Ajallooeian, M., Gay, S., Tuleu, A., Spröwitz, A., Ijspeert, A. J.
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013, pages: 3390-3397, Tokyo, 2013 (inproceedings)
2012
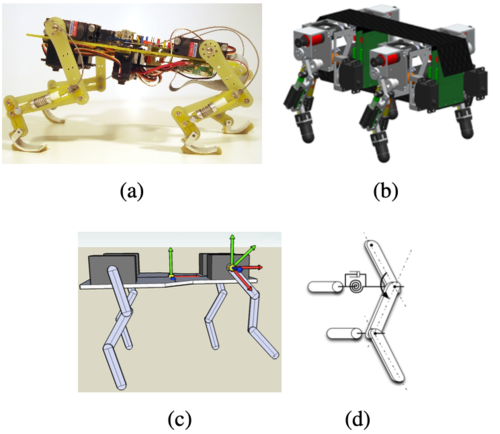
Development of a Minimalistic Pneumatic Quadruped Robot for Fast Locomotion
Narioka, K., Rosendo, A., Spröwitz, A., Hosoda, K.
In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2012, pages: 307-311, IEEE, Guangzhou, 2012 (inproceedings)
Locomotion through Reconfiguration based on Motor Primitives for Roombots Self-Reconfigurable Modular Robots
Bonardi, S., Moeckel, R., Spröwitz, A., Vespignani, M., Ijspeert, A. J.
In Robotics; Proceedings of ROBOTIK 2012; 7th German Conference on, pages: 1-6, 2012 (inproceedings)
2011
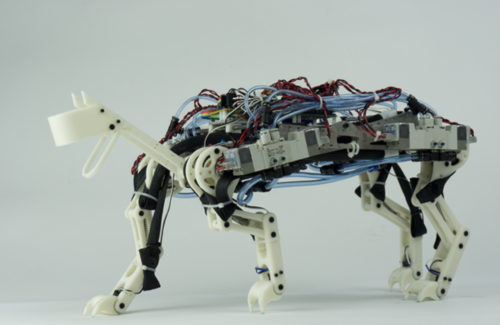
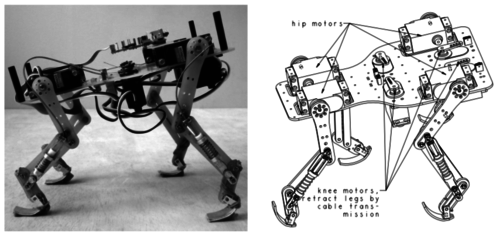
Oncilla Robot—A Light-weight Bio-inspired Quadruped Robot for Fast Locomotion in Rough Terrain
Spröwitz, A., Kuechler, L., Tuleu, A., Ajallooeian, M., D’Haene, M., Moeckel, R., Ijspeert, A. J.
Symposium on adaptive motion of animals and machines (AMAM 2011), January 2011 (conference)
2010
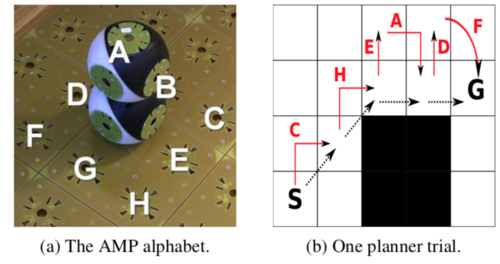
Graph signature for self-reconfiguration planning of modules with symmetry
Asadpour, M., Ashtiani, M. H. Z., Spröwitz, A., Ijspeert, A. J.
In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages: 5295-5300, IEEE, St. Louis, MO, 2010 (inproceedings)
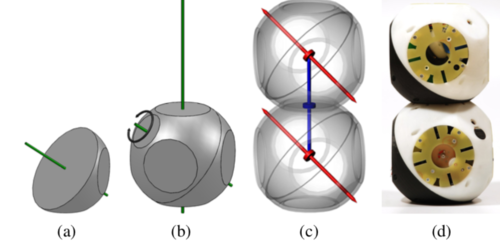
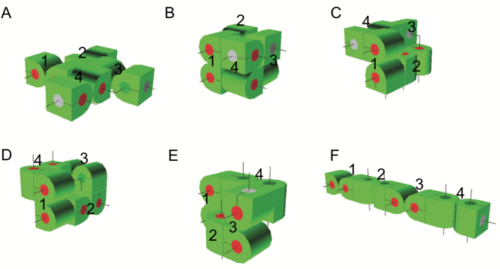
Roombots - Towards decentralized reconfiguration with self-reconfiguring modular robotic metamodules
Spröwitz, A., Laprade, P., Bonardi, S., Mayer, M., Moeckel, R., Mudry, P., Ijspeert, A. J.
In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 1126-1132, IEEE, Taipeh, 2010 (inproceedings)
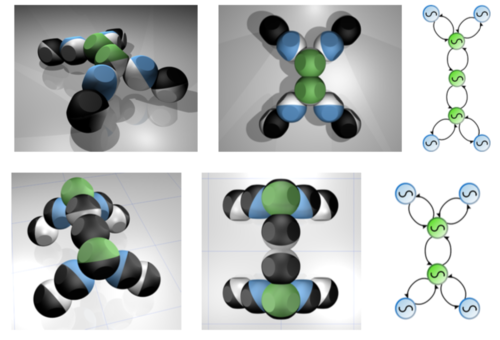
Automatic Gait Generation in Modular Robots: to Oscillate or to Rotate? that is the question
Pouya, S., van den Kieboom, J., Spröwitz, A., Ijspeert, A. J.
In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 514-520, IEEE, Taipei, 2010 (inproceedings)
Roombots: Design and Implementation of a Modular Robot for Reconfiguration and Locomotion
Spröwitz, A.
EPFL, Lausanne, Lausanne, 2010 (phdthesis)
2009
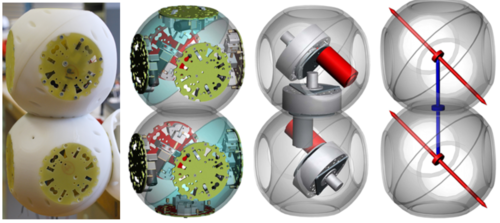
Roombots-mechanical design of self-reconfiguring modular robots for adaptive furniture
Spröwitz, A., Billard, A., Dillenbourg, P., Ijspeert, A. J.
In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), pages: 4259-4264, IEEE, Kobe, 2009 (inproceedings)
2008
Passive compliant quadruped robot using central pattern generators for locomotion control
Rutishauser, S., Spröwitz, A., Righetti, L., Ijspeert, A. J.
In Proceedings of the 2008 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, pages: 710-715, IEEE, Scottsdale, AZ, 2008 (inproceedings)
Graph signature for self-reconfiguration planning
Asadpour, M., Spröwitz, A., Billard, A., Dillenbourg, P., Ijspeert, A. J.
In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages: 863-869, IEEE, Nice, 2008 (inproceedings)

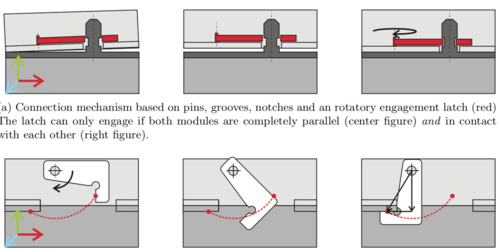
An active connection mechanism for modular self-reconfigurable robotic systems based on physical latching
Spröwitz, A., Asadpour, M., Bourquin, Y., Ijspeert, A. J.
In Proceedings on the 2008 IEEE International Conference on Robotics and Automation (ICRA), 2008, pages: 3508-3513, IEEE, Pasadena, CA, 2008 (inproceedings)
2007
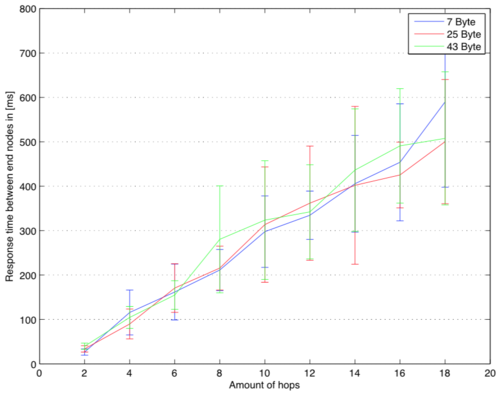
An easy to use bluetooth scatternet protocol for fast data exchange in wireless sensor networks and autonomous robots
Mockel, R., Spröwitz, A., Maye, J., Ijspeert, A. J.
In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages: 2801-2806, IEEE, San Diego, CA, 2007 (inproceedings)
2006

Project course "Design of Mechatronic Systems"
Koch, C., Spröwitz, A., Radler, O., Strohla, T.
In IEEE International Conference on Mechatronics, pages: 69-72, IEEE, Budapest, 2006 (inproceedings)
2004
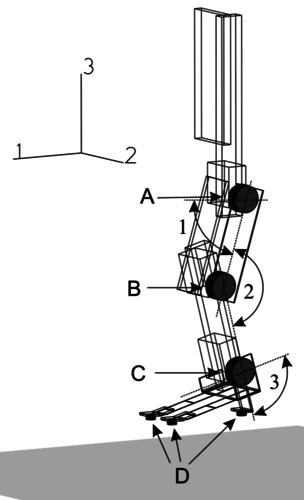
Simple and low-cost compliant leg-foot system
Meyer, F., Spröwitz, A., Lungarella, M., Berthouze, L.
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), 1, pages: 515-520, IEEE, Sendai, Japan, 2004 (inproceedings)