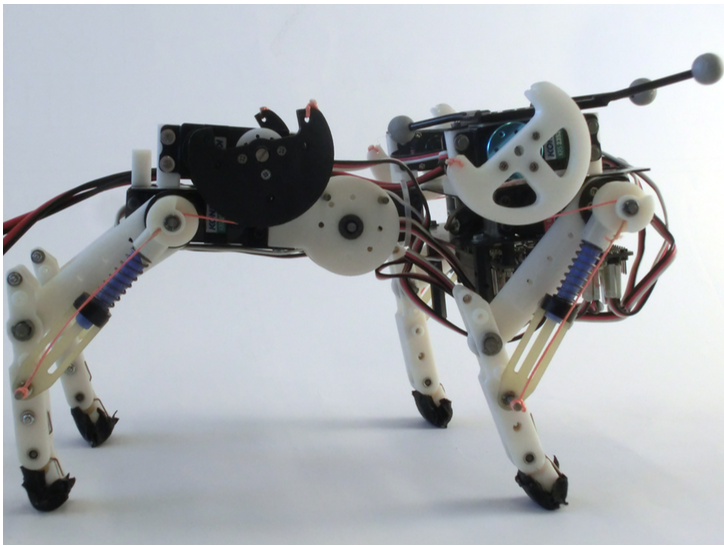
Benefits of an active spine supported bounding locomotion with a small compliant quadruped robot
2013
Conference Paper
dlg
We studied the effect of the control of an active spine versus a fixed spine, on a quadruped robot running in bound gait. Active spine supported actuation led to faster locomotion, with less foot sliding on the ground, and a higher stability to go straight forward. However, we did no observe an improvement of cost of transport of the spine-actuated, faster robot system compared to the rigid spine.
| Author(s): | Khoramshahi, Mahdi and Spröwitz, Alexander and Tuleu, Alexandre and Ahmadabadi, M. N. and Ijspeert, Auke Jan |
| Book Title: | Robotics and Automation (ICRA), 2013 IEEE International Conference on |
| Pages: | 3329--3334 |
| Year: | 2013 |
| Month: | May |
| Department(s): | Dynamic Locomotion |
| Research Project(s): |
Animal-inspired robot legs
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA.2013.6631041 |
| Event Place: | Karlsruhe, Germany |
| Links: |
Youtube
|
| Video: | |
|
BibTex @inproceedings{escidoc:2316250,
title = {Benefits of an active spine supported bounding locomotion with a small compliant quadruped robot},
author = {Khoramshahi, Mahdi and Spr{\"o}witz, Alexander and Tuleu, Alexandre and Ahmadabadi, M. N. and Ijspeert, Auke Jan},
booktitle = {Robotics and Automation (ICRA), 2013 IEEE International Conference on},
pages = {3329--3334},
month = may,
year = {2013},
doi = {10.1109/ICRA.2013.6631041},
month_numeric = {5}
}
|
|