Dynamic Locomotion Group
We investigate principles of biomechanics and control of dynamic locomotion, in legged animals and robots.

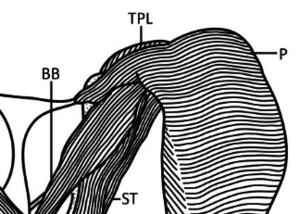
Biarticular compliant hopper leg

Team: Group Dynamic Locomotion

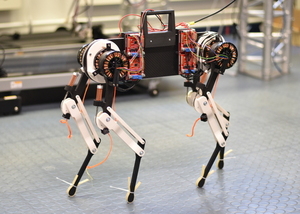
Quadruped robot project

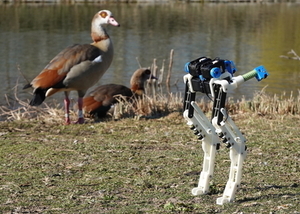
Quadruped project Morti

Learning locomotion by shaping reward landscapes

Quadruped robot Cheetah-cub

Quadruped robot Cheetah-cub

Compliant two segmented leg for hopping experiments

Dynamic Locomotion Group in February 2018
We have moved!
Animals locomote gracefully through the world. Legged robots have not yet reached comparable agility, robustness, and energy efficiency, which limits their applicability and usefulness. We develop and control legged robots and simulations, and we research biomechanics and neurocontrol of legged locomotion.
We consider bioinspired legged locomotion as the product of motor control, sensing, and an adaptive mechanical system. Describing the underlying principles that enable animals to achieve agile and robust locomotion is key to understand legged locomotion.
We focus on applied legged robots and their simulation models to create biomechanically relevant locomotion data. Our approach allows us to qualitatively and quantitatively analyze and compare legged locomotion in robots and animals. We test and apply existing locomotion control concepts on novel bioinspired legged robots, and we develop new concepts for locomotion controllers.
We work with monopedal, bipedal, and quadrupedal legged robots, inspired by model animals like humans, ratites, or vertebrate animals like cats. We also look at invertebrate animals, i.e. spiders apply a hybrid actuation system to flex and extend leg joints.