Legged animals outperform legged robots albeit limited muscle power density and sensorimotor conduction velocity responsible for comparably slow reflexes. We see that animals run faster and more efficiently, and incorporate higher agility in a smaller building volume. But how does the animal's neurocontrol orchestrate legs and body, what role plays morphology, and how are animals not overwhelmed by a control task that requires high-end computers, kilo-hertz rate sensory feedback, and complex mathematical models in robots?
At the Dynamic Locomotion Group, sharing our research results and tools is the goal and we contribute to the open-source robots Oncilla robot [ ] and Solo robot [ ] through the Open Dynamic Robot Initiative. We developed a rugged, light-weight, and customizable foot sensor ('FootTile') to reliably sense touch-down timing and stance phase loading. Arrays of our waterproofed sensor sense the instantaneous center of pressure during locomotion in natural terrain [ ].
We developed a robot leg with animal-like leg segmentation and a modular spring-tendon network. We find that the animal-like spring-tendon configuration hops with an below-average cost of locomotion of animals [ ]. With a hopping robot and boom-guide we recreated an environment that alters the effect of gravity. The gradually changing cost landscape shows how learning of hopping locomotion can be guided through a sequentially increase of environment loading or the robot's complexity [ ].
A close look reveals hysteresis loops in muscles' work cycles also during negative power conditions (active braking or damping). We examine viscous, physical damping that produces forces based on joint velocity without need for high-frequency sensory feedback [ ]. In a numerical simulation study, we provide evidence that small amounts of intrinsic, viscous damping can improve locomotion [ ].
We research the trunk's subtle swaying motion in the fore-aft direction and its consequence to bipedal running. Previously, ground reaction forces were documented that intersect in a virtual point above the human trunk's center of mass. We predict feasible running gaits with a virtual point below the center of mass and characterize related actuator characteristics [ ]. With collaborators from human locomotion research, we then show that human runners display a virtual point below, in certain locomotion conditions [ ]. We applied our model to bird-type and theropod-type trunk morphologies [ ].
Fluid-based (hydraulic, pneumatic) actuation is an omnipresent tool in engineering; less known is that animals and plants integrate fluidic actuation as well. Several spider-leg joints are potentially actuated by hemolymph. Inspired by a highly structured membrane in spider leg joints, we develop a spider-inspired rotary rolling diaphragm actuator [ ] which shows highest mechanical efficiency, independent from actuator speed and load.
With large feedback delays in animals, how can mechanosensory information trigger feedback loops timely? Intra-spinal sensing minimizes feedback delay, and intra-spinal accessory lobes in birds have been hypothesized to act as such sensors. We mapped the topology of the surrounding soft tissues and identified morphologies in small birds (quail) that are candidates to support accessory-lobe-based, intra-spinal sensing [ ].
We merge leg designs featuring mechanical elasticities (springs) and active compliance (feedback-and model-based virtual spring) leading to a new class of hybrid joint actuation that allows low control frequencies; the hybrid-actuated leg is controllable with sensory update frequencies around 50Hz, compared to typical, active robot leg compliance at 200Hz and beyond [ ].

Bioinspired robotics
We research the interaction of body shape/morphology and neuromuscular control, to understand the underlying principles of legged locomotion. We develop bioinspired controllers with open- and closed-loop Central Pattern Generators to generate versatile, dynamic, and robust bipedal and quadruped locomotion under controlled condi... Read More
Learning dynamic locomotion
Locomotion in animals is potentially the result of clever coupling between morphology and neural control. Visibly, this results in agile, efficient and graceful animal movement. In engineering, this coupling is often mimicked in robot design. For example, to allow compliant control of an end-effector, reflected inertia is minimized ... Read More

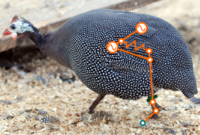
Lumbosacral sensing in birds
Evidence suggests that birds possess a novel sensing organ in the spinal canal; the `lumbosacral organ' (LSO), which may contribute to their locomotor agility and wide evolutionary success. Parts of the LSO soft tissue structure are visible with the naked eye, and already researchers in the19th century speculated about its funct... Read More
Dynamic bipedal locomotion
Bipedalism evolved multiple times in animals and can be found in extant birds (Ratites), mammals (humans, kangaroos, apes), and even in some lizards. Bipedal locomotion is a more complicated form of legged locomotion, compared to quadrupedalism, where a heavy, horizontal trunk and a second pair of legs simplifies static stability an... Read More