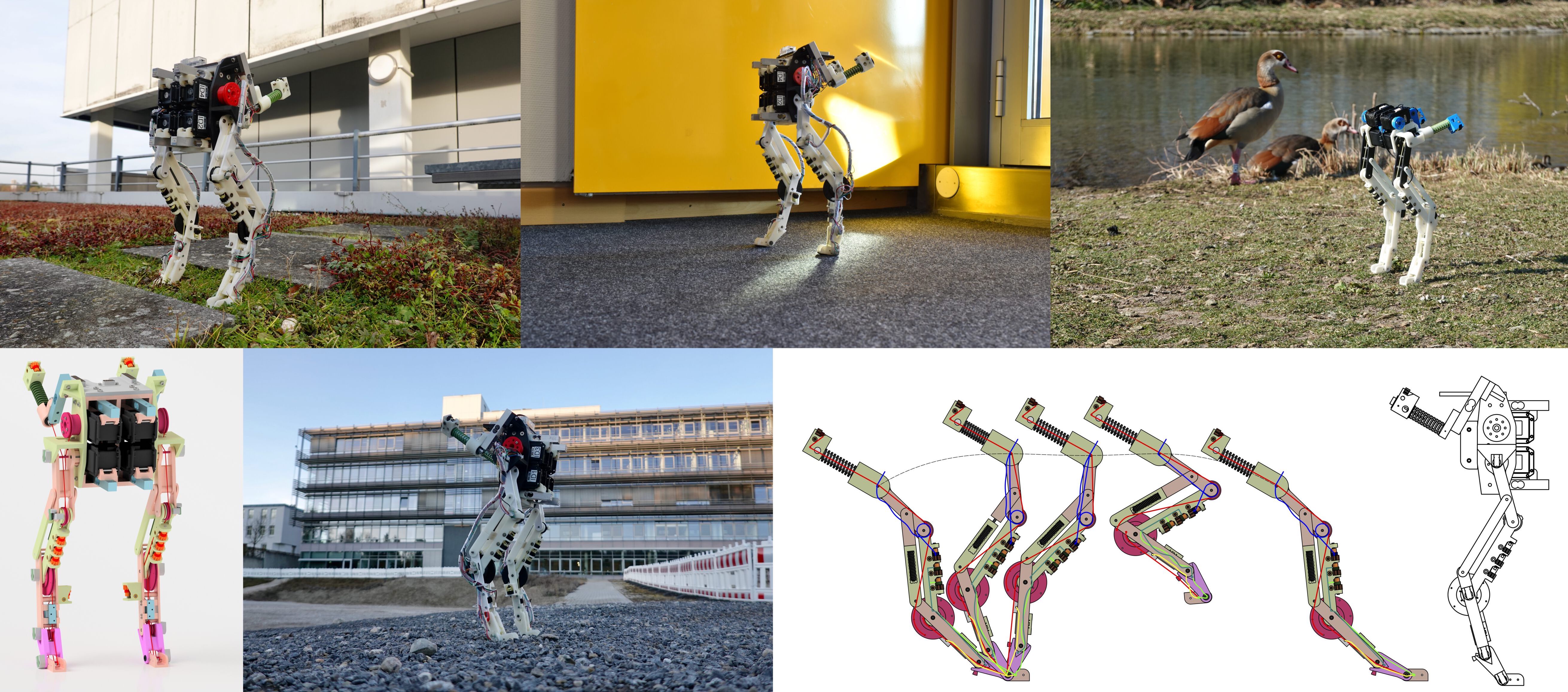
BirdBot robot in front of the Max Planck Institute for Intelligent Systems, and with birds in the park of Stuttgart.
Birds walk differently than humans — in the swing phase, they fold their feet backward [video]. But what is the function of this motion? We attribute the toe movement of birds to a mechanical coupling between leg joints, and the engagement and disengagement of this coupling. Instead of a motor control system where electrical impulses are sent to individual muscles of each joint, we hypothesized a new function of the foot-leg coupling through a network of muscles and tendons that extends across multiple joints. This multi-joint muscle-tendon network
- coordinates the foot's folding in the swing phase [video][video],
- supports disengagement at the end of stance [video] [video]
- distributes loads and movement between joints [video], and
- engages and disengages the leg's parallel spring based on the toe orientation [video][video][video].
The BirdBot project is a collaboration project of Biologists (Dr Monica Daley, University of California, Irvine and RVC, UK, London) and robotics researcher at the Max Planck Institute for Intelligent Systems. BirdBot has been developed as an emu-inspired robot with mechanical joint-coupling. The toe's orientation (extended or flexed) engages and disengages the leg's parallel elasticity, propagated by the leg's spring-tendon network.
Birds like ostriches and flamingos can stand for long times without tiring. We suspect the mechanical coupling between leg joints as a reason for this energy effient design. The joint coupling is even visible when they sit down; toe joints stay flexed when sitting [video].
A human can also stand without tiring for a long time, but only with the knees ‘locked’ in the extended position, leading to a small effective loading arm. But flexed legs during squatting is strenuous for humans, already after a few minutes. Yet birds bent leg structures over long periods time, and many birds sleep while standing on a single leg. Birds also run with a crouched leg posture, while humans bend the knee only minimally during running.
BirdBot can do the same as birds: no motor power is needed to keep its postures upright. And the robot runs with bend leg joints. We built BirdBot's legs after the legs of flightless birds like emus and ostriches. The robot's leg joints are built with pulleys, and all joints are loaded by spring-tendon networks [picture][picture][video]. You find more details in our [video]. Specific spring-tendon networks are implemented for each individual function:
{kind=link}
{kind=link}
- main gravity compensation,
- parallel leg spring disengagement,
- knee flexion, and
- toe extension before touchdown.
A major novelty of its leg design is embedded in BirdBot's toes. These toes act as a lever arm, which engages and disengages the leg's parallel spring. Toes and the connected spring-tendon present essentially a clutching mechanism inspired by the legs of birds. The toe is the most distal component of BirdBot spring-tendon network. With the clutching mechanism, the foot and leg joints require no motor actuation in the stance phase. The leg spring powers the leg's joints, and the multi-joint spring-tendon mechanism coordinates joint movements. When the leg is pulled into the swing phase, the foot disengages the leg’s spring. Have a look at the video showing BirdBot walking in the lab of the Dynamic Locomotion Group [video].
Each leg is powered by two motors; the hip joint motor swings the leg back and forth. The knee motor flexes the knee joint to pull the leg up. BirdBot walks on a treadmill. Like its natural model, BirdBot is energy-efficient. Birdbot walks at a power consumption of around 20W-23W, including its four servo motors. The 1.7kg BirdBot robot reaches a locomotion speed between 0.5m/s and 0.75m/s, at 0.29m leg length. The robot needs fewer motors than other machines to coordinate its four leg joints.
BirdBot's leg mechanism is scalable to large size [picture][picture]. BirdBot's mechanism enables energy-efficient and robust robot walking. The robot's leg mechanically switches compliance between swing and stance (from loose to compliant), and back between stance and swing. Our results with BirdBot walking lead us to believe that similar benefits hold true for birds.
{kind=link}
{kind=link}
You find details of the BirdBot project on our [publication page]. The [free-access referral link] will guide you to a free, non-paywall BirdBot article.
CAD files and BirdBot's controller code are available together with BirdBot's locomotion data at the [Edmond link], look for zip files.
You find more materials, including videos and pictures of BirdBot linked below. Copyrights are with the Dynamic Locomotion Group, MPI-IS and Monica Daley, UCI.
- Video1 slowmotion 1.5Hz, video2 slowmotion 1.5Hz, video3 walking treadmill1, video4 treadmill2, video5 treadmill3, video6 treadmill 4, video7 treadmill 5, video8 disengagement, video9 coupling
- Video1 tendon-network, video2 tendon-network, video3 tendon-network, video4 tendon-network
- Video1 emu, video2 emu, video3 emu, video4 emu
- Picture1, picture2, picture3, picture4, picture5, picture6, picture7, picture8, picture9 scaling, picture10 bb1scaling2, picture11 bb1scaling3, picture12 bb1institute1, picture12 bb1institute2, picture13 2bb, picture14 bb1yellow, picture15 bb1outside
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
How to cite: Badri-Spröwitz, A., Aghamaleki Sarvestani, A., Sitti, M., & Daley, M. A. (2022). BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching. Science Robotics, 7(64), eabg4055. https://doi.org/10.1126/scirobotics.abg4055
Badri-Spröwitz and Aghamaleki Sarvestani are equally contributing authors.
BirdBot project news and media coverage:
Scientific American, IEEE spectrum, cbc.ca, heise.de, robohub.org, newscientist.com, deingenieur.nl, science.orf.at, servo magazine, hackster.io, sciencetimes.com, unite.ai, wissenschaft.de, www.idw-online.news, machinedesign.com, tucson.com,
Podcasts: Soft robotics podcast