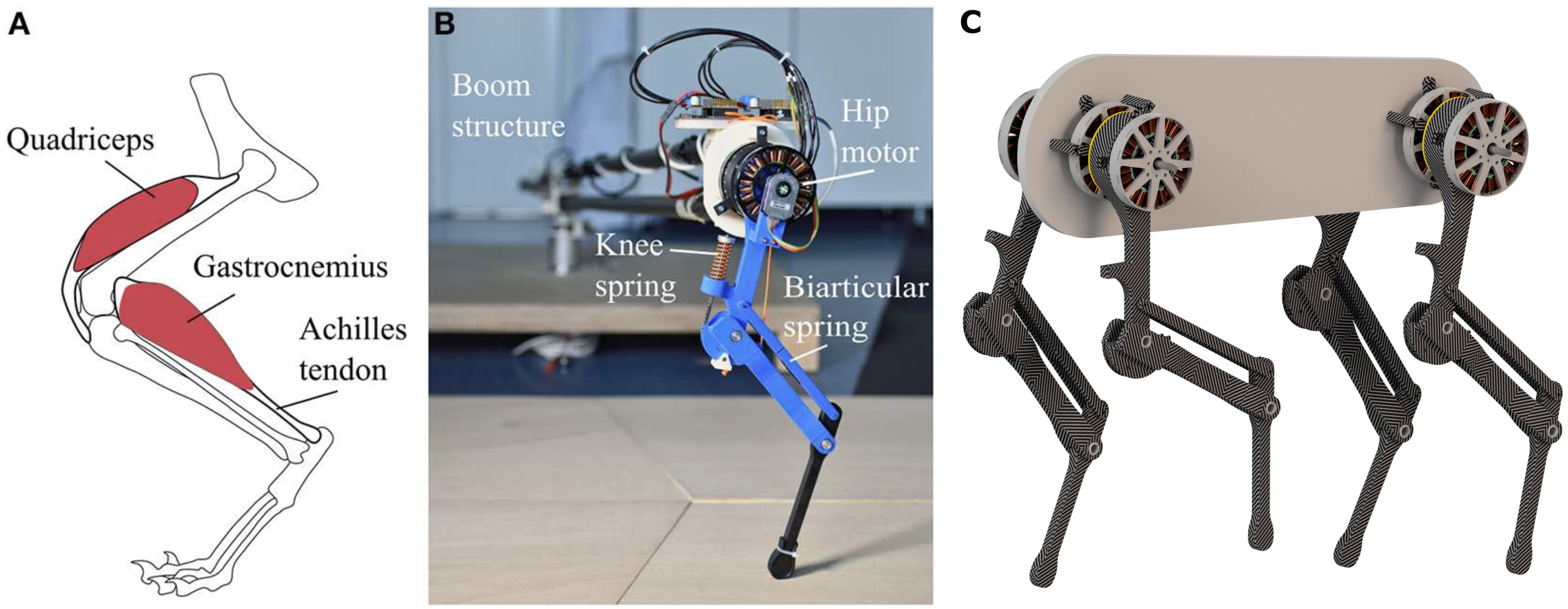
Bioinspired leg design for hopping and quadrup robots. A) A schematic presentation of a cat's hind leg, with the quadriceps (monoarticulate) and the gastrocnemius (biarticulate) muscle-tendons shown. B) The elasticity and connectivity of both muscles are presented by spring-tendons inserting between the femur and the lower leg (knee spring), and the femur and the ankle (biarticular spring). C) A possible quadruped configuration with four spring-loaded legs.
Legged animals outperform legged robots albeit limited muscle power density and sensorimotor conduction velocity of biological tissue. Animals run faster and more efficiently, seemingly effortless in natural terrain, and incorporate higher agility in a smaller building volume.
But how do leg and trunk designs interact with neurocontrol, and how is the animal's control effort reduced? We aim to understand these interactions also to improve the locomotion robustness and efficiency of bioinspired legged robots. For example, we test how leg stiffness and coupling through ligaments and tendons change the performance of robot legs. We develop mechanics, mechatronics, and control in-house, and analyze the resulting performance, and gait kinematics, and dynamics of bioinspired robots. With robots and simulation models, we systematically investigate design and control parameters and establish a connection between form/morphology and function/legged locomotion.
We are inspired by the muscle-tendon network structures in the hind limbs of cats; the Quadriceps applies torque at the knee joint, while the Gastrocnemius muscle-tendon inserts torque into the knee and ankle joint. Previous work suggested joint power transfer as a possible function of biarticular muscle tendons. We hypothesized that the Gastrocnemius muscle-tendon functions as a leg-angle elasticity, contrary to it being mounted in leg length direction.
Indeed, in experiments, we show that the Gastrocnemius-like spring-tendon effectively stores and releases energy inserted by the robot's leg angle (hip) actuator. We compare a pantograph leg with and without a Gastrocnemius-like spring-tendon. The biarticular-elastic leg hops with a cost of transport of 0.8 J/N/m (64% CoT of a natural runner of equal body mass), compared to the single-spring configuration with a cost of transport of 1.3 J/N/m (net CoT). Hence, the biarticular-elastic leg configuration has a clear energetic advantage at hopping locomotion [ ].