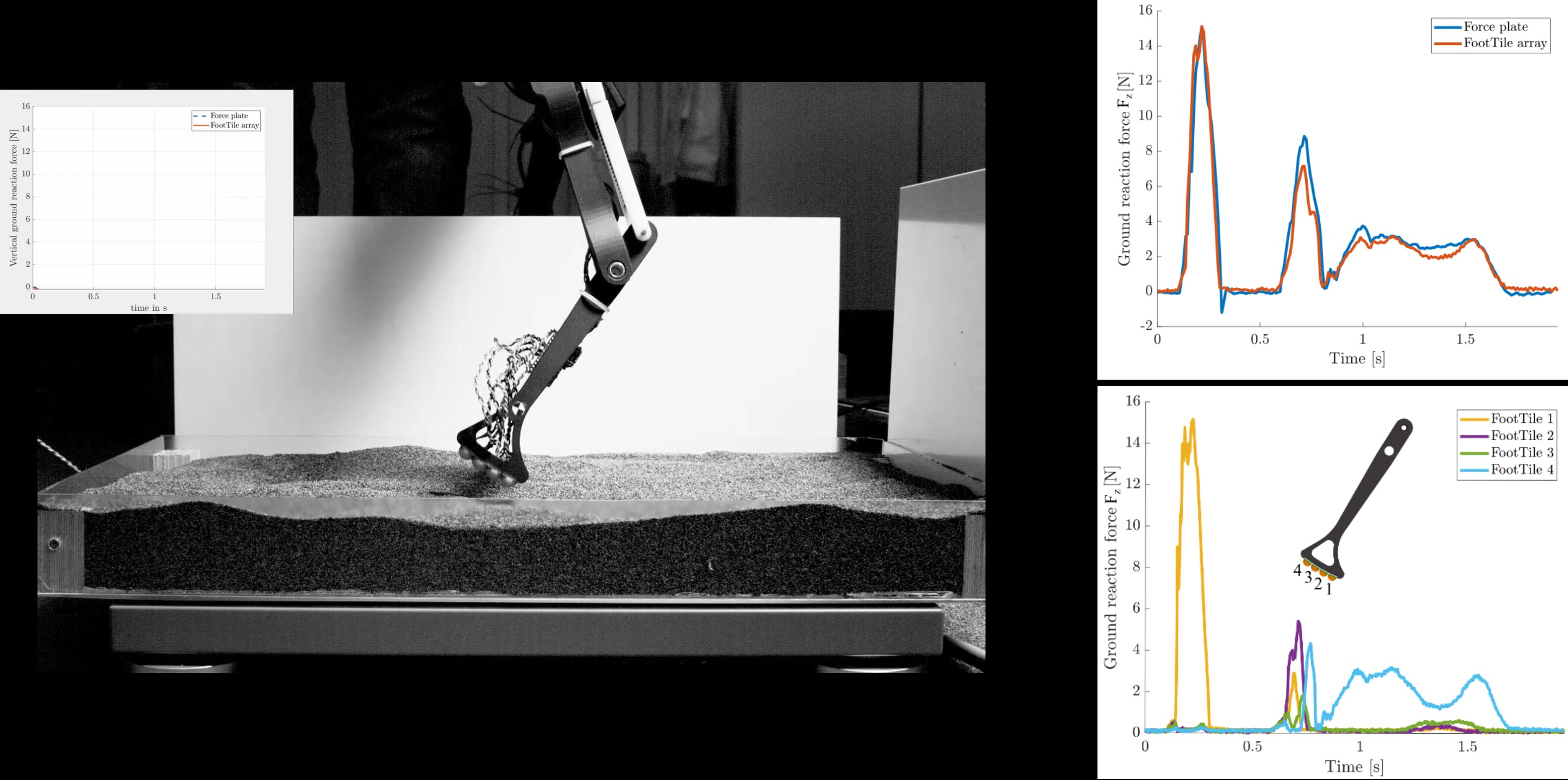
The FootTile sensor was developed for applications in harsh conditions; it can be submerged in water, mud, or as shown here, in granular media.
Foot contact and ground reaction forces are common feedback information in legged robots. However, the harsh conditions at foot contact and the constant wear require a rugged design. We aimed at an inexpensive and lightweight sensor that could be mounted on the foot of legged robots.
We developed FootTile, a foot sensor for reaction force and center of pressure sensing in challenging terrain. We compare FootTile's design to commercial biomechanical devices, force plates, and pressure plates. The 1gram lightweight, 10x10mm FootTile accurately estimates force and pressure distribution during legged locomotion at a sampling rate of 330 Hz. The sensor can be adapted in its range for a given load case.
We validate experimentally the performance of the individual sensor, an array of FootTiles for the center of pressure sensing, and the ground reaction force estimation during locomotion in granular substrate. We show the FootTile's accuracy as a waterproof sensor in mud, as an example for real-world rough terrain application [ ].