Graph signature for self-reconfiguration planning
2008
Conference Paper
dlg
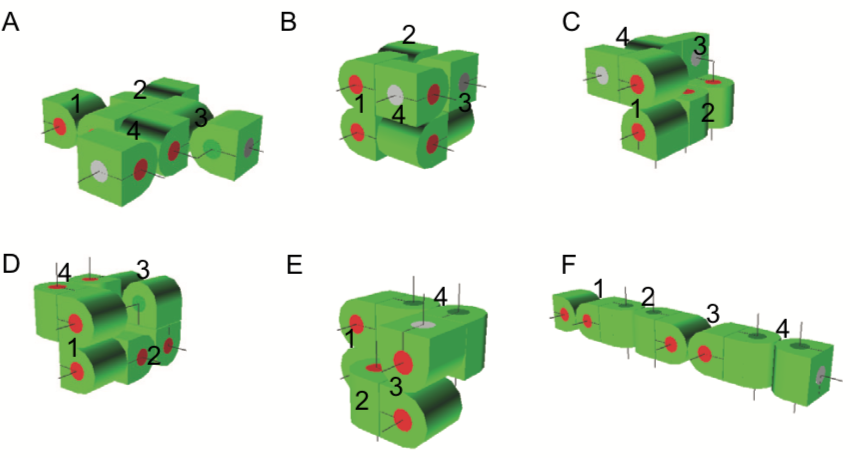
This project incorporates modular robots as build- ing blocks for furniture that moves and self-reconfigures. The reconfiguration is done using dynamic connection / disconnection of modules and rotations of the degrees of freedom. This paper introduces a new approach to self-reconfiguration planning for modular robots based on the graph signature and the graph edit-distance. The method has been tested in simulation on two type of modules: YaMoR and M-TRAN. The simulation results shows interesting features of the approach, namely rapidly finding a near-optimal solution.
| Author(s): | Asadpour, Masoud and Spröwitz, Alexander and Billard, Aude and Dillenbourg, Pierre and Ijspeert, Auke Jan |
| Book Title: | Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems |
| Pages: | 863--869 |
| Year: | 2008 |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/IROS.2008.4650673 |
| Address: | Nice |
|
BibTex @inproceedings{escidoc:2316391,
title = {Graph signature for self-reconfiguration planning},
author = {Asadpour, Masoud and Spr{\"o}witz, Alexander and Billard, Aude and Dillenbourg, Pierre and Ijspeert, Auke Jan},
booktitle = {Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems},
pages = {863--869},
publisher = {IEEE},
address = {Nice},
year = {2008},
doi = {10.1109/IROS.2008.4650673}
}
|
|