Gastrocnemius and Power Amplifier Soleus Spring-Tendons Achieve Fast Human-like Walking in a Bipedal Robot
2022
Conference Paper
dlg
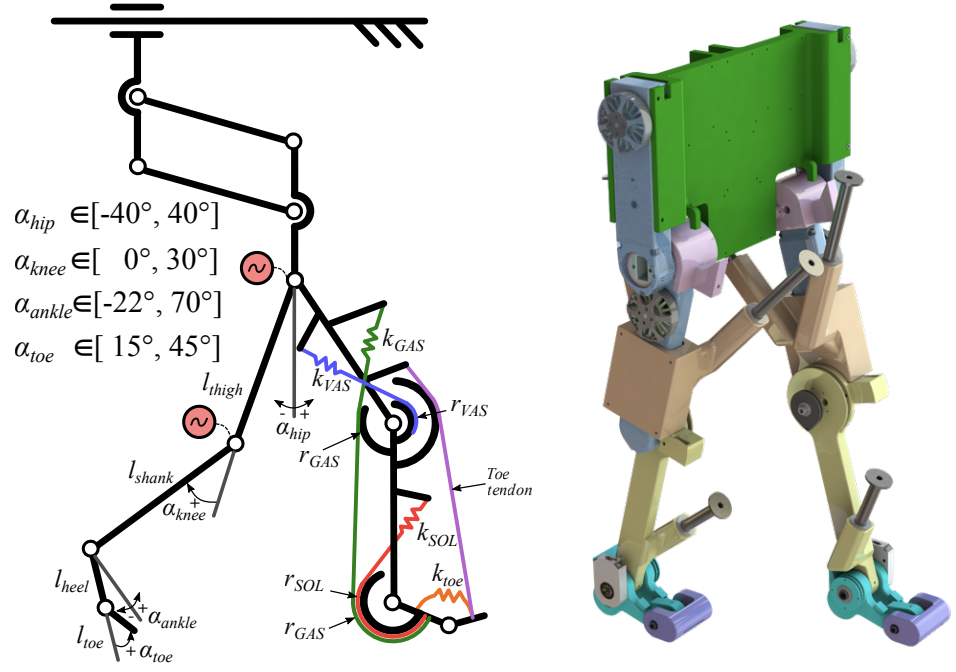
Legged locomotion in humans is governed by natural dynamics of the human body and neural control. One mechanism that is assumed to contribute to the high efficiency of human walking is the impulsive ankle push-off, which potentially powers the swing leg catapult. However, the mechanics of the human’s lower leg with its complex muscle-tendon units spanning over single and multiple joints is not yet understood. Legged robots allow testing the interaction between complex leg mechanics, control, and environment in real-world walking gait. We developed a 0.49 m tall, 2.2 kg anthropomorphic bipedal robot with Soleus and Gastrocnemius muscle-tendon units represented by linear springs, acting as mono- and biarticular elastic structures around the robot’s ankle and knee joints. We tested the influence of three Soleus and Gastrocnemius spring-tendon configurations on the ankle power curves, the coordination of the ankle and knee joint movements, the total cost of transport, and walking speed. We controlled the robot with a feed-forward central pattern generator, leading to walking speeds between 0.35 m/s and 0.57 m/s at 1.0 Hz locomotion frequency, at 0.35 m leg length. We found differences between all three configurations; the Soleus spring-tendon modulates the robot’s speed and energy efficiency likely by ankle power amplification, while the Gastrocnemius spring-tendon changes the movement coordination between knee and ankle joints during push-off.
| Author(s): | Bernadett Kiss and Emre Cemal Gonen and An Mo and Alexandra Buchmann and Daniel Renjewski and Alexander Badri-Spröwitz |
| Book Title: | 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
| Year: | 2022 |
| Month: | October |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| DOI: | 10.48550/arXiv.2203.01588 |
| Event Name: | IROS2022 |
| Event Place: | Kyoto, Japan |
| Digital: | True |
| State: | In press |
| URL: | https://arxiv.org/abs/2203.01588 |
| Links: |
Data-cad-code
VideoYT |
| Video: | |
|
BibTex @conference{ecowalka2022,
title = {Gastrocnemius and Power Amplifier Soleus Spring-Tendons Achieve Fast Human-like Walking in a Bipedal Robot},
author = {Kiss, Bernadett and Gonen, Emre Cemal and Mo, An and Buchmann, Alexandra and Renjewski, Daniel and Badri-Spr{\"o}witz, Alexander},
booktitle = {2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
publisher = {IEEE},
month = oct,
year = {2022},
doi = {10.48550/arXiv.2203.01588},
url = {https://arxiv.org/abs/2203.01588},
month_numeric = {10}
}
|
|