Oncilla Robot—A Light-weight Bio-inspired Quadruped Robot for Fast Locomotion in Rough Terrain
2011
Conference Paper
dlg
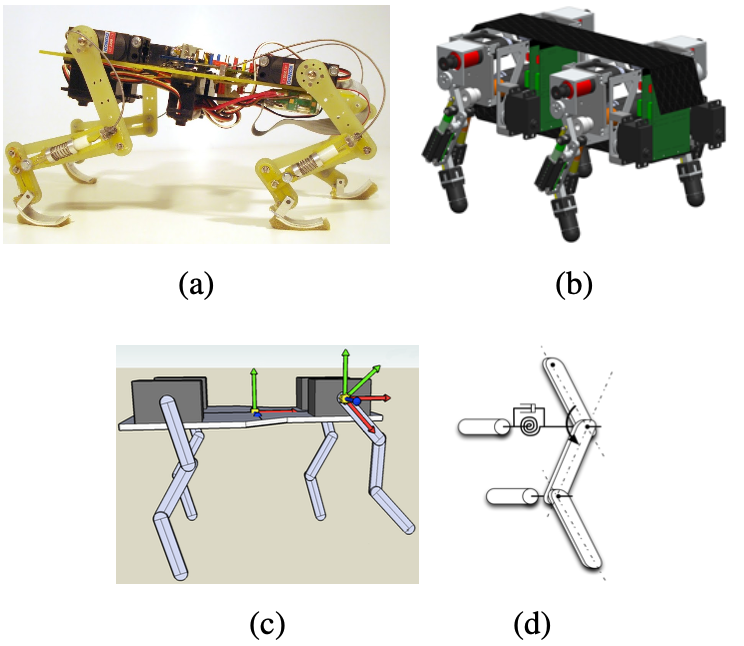
On the hardware level, we are proposing and testing a bio-inspired quadruped robot design (Oncilla robot), based on light-weight, compliant, and three-segmented legs. Our choice of placing the compliance such that it is spanning two joints enforces a non-linear spring stiffness. Based on the SLIP-model assumption, we compare progressive and de- gressive stiffness profiles against a linear-leg stiffness. To facilitate fast and throughout testing also of control approaches we have created a robot model of Oncilla robot in simulation (in Webots [1], a physics-based simulation environment). Here we are presenting new simulation results based on open-loop-central pattern generator (CPG) control and PSO- optimization of the CPG parameters. Our quadruped robot is equipped with passive compliant elements in its legs, and we apply two different strategies to make use of the legs’ compliance during stance phase. This enables us to find stable trot gait patterns propelling the robot up to 1 m/s (more than four times the robot’s leg length), depending on the applied stance phase leg-strategy. Different trot gait patterns emerge, and resulting trot gaits are variable in stability (tested as robustness against external perturbations) and speed.
| Author(s): | Alexander Spröwitz and Lorenz Kuechler and Alexandre Tuleu and Mostafa Ajallooeian and Michiel D’Haene and Rico Moeckel and Auke Jan Ijspeert |
| Book Title: | Symposium on adaptive motion of animals and machines (AMAM 2011) |
| Year: | 2011 |
| Month: | January |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| Attachments: |
|
|
BibTex @conference{amam2011,
title = {Oncilla Robot—A Light-weight Bio-inspired Quadruped Robot for Fast Locomotion in Rough Terrain},
author = {Spr{\"o}witz, Alexander and Kuechler, Lorenz and Tuleu, Alexandre and Ajallooeian, Mostafa and D'Haene, Michiel and Moeckel, Rico and Ijspeert, Auke Jan},
booktitle = {Symposium on adaptive motion of animals and machines (AMAM 2011)},
month = jan,
year = {2011},
doi = {},
month_numeric = {1}
}
|
|