Roombots - Towards decentralized reconfiguration with self-reconfiguring modular robotic metamodules
2010
Conference Paper
dlg
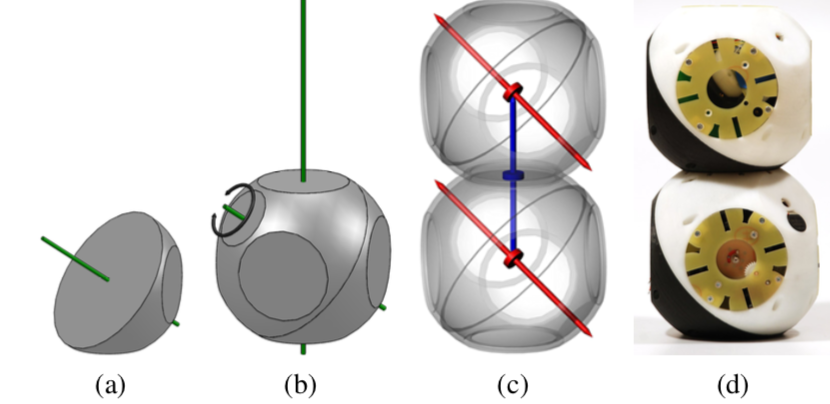
This paper presents our work towards a decentralized reconfiguration strategy for self-reconfiguring modular robots, assembling furniture-like structures from Roombots (RB) metamodules. We explore how reconfiguration by loco- motion from a configuration A to a configuration B can be controlled in a distributed fashion. This is done using Roombots metamodules—two Roombots modules connected serially—that use broadcast signals, lookup tables of their movement space, assumptions about their neighborhood, and connections to a structured surface to collectively build desired structures without the need of a centralized planner.
| Author(s): | Spröwitz, Alexander and Laprade, Philippe and Bonardi, Stephane and Mayer, Mikael and Moeckel, Rico and Mudry, Pierre-Andre and Ijspeert, Auke Jan |
| Book Title: | Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
| Pages: | 1126--1132 |
| Year: | 2010 |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/IROS.2010.5649504 |
| Address: | Taipeh |
|
BibTex @inproceedings{escidoc:2316387,
title = {Roombots - Towards decentralized reconfiguration with self-reconfiguring modular robotic metamodules},
author = {Spr{\"o}witz, Alexander and Laprade, Philippe and Bonardi, Stephane and Mayer, Mikael and Moeckel, Rico and Mudry, Pierre-Andre and Ijspeert, Auke Jan},
booktitle = {Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {1126--1132},
publisher = {IEEE},
address = {Taipeh},
year = {2010},
doi = {10.1109/IROS.2010.5649504}
}
|
|