Multi-segmented Adaptive Feet for Versatile Legged Locomotion in Natural Terrain
2023
Conference Paper
dlg
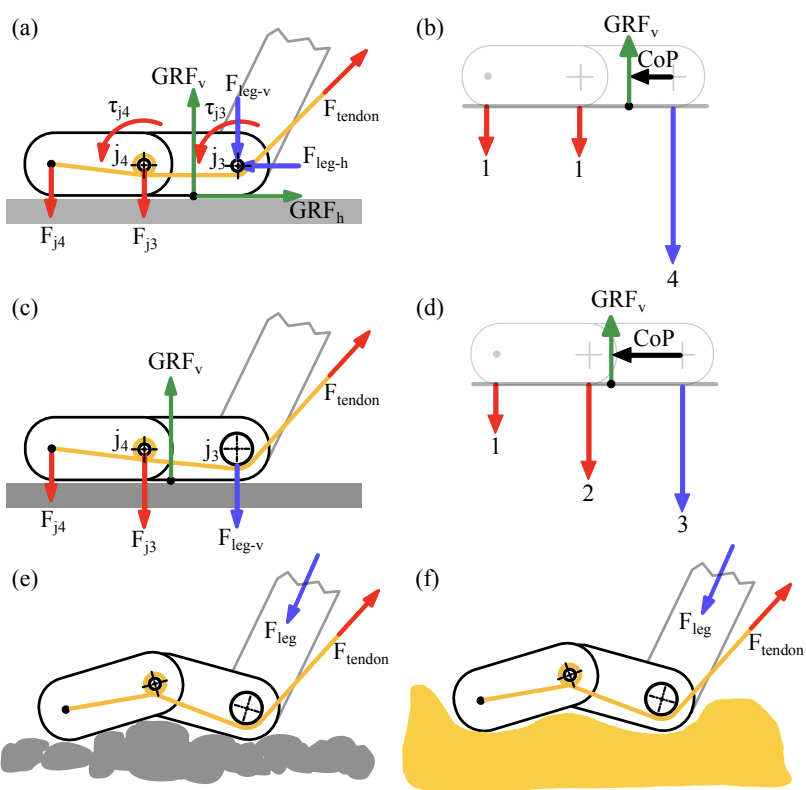
Most legged robots are built with leg structures from serially mounted links and actuators and are controlled through complex controllers and sensor feedback. In comparison, animals developed multi-segment legs, mechanical coupling between joints, and multi-segmented feet. They run agile over all terrains, arguably with simpler locomotion control. Here we focus on developing foot mechanisms that resist slipping and sinking also in natural terrain. We present first results of multi-segment feet mounted to a bird-inspired robot leg with multi-joint mechanical tendon coupling. Our one- and two-segment, mechanically adaptive feet show increased viable horizontal forces on multiple soft and hard substrates before starting to slip. We also observe that segmented feet reduce sinking on soft substrates compared to ball-feet and cylinder feet. We report how multi-segmented feet provide a large range of viable centre of pressure points well suited for bipedal robots, but also for quadruped robots on slopes and natural terrain. Our results also offer a functional understanding of segmented feet in animals like ratite birds.
| Award: | (Outstanding locomotion paper award) |
| Author(s): | Abhishek Chatterjee and An Mo and Bernadett Kiss and Emre Cemal Goenen and Alexander Badri-Spröwitz |
| Book Title: | 2023 IEEE International Conference on Robotics and Automation (ICRA 2023) |
| Pages: | 1162--1169 |
| Year: | 2023 |
| Month: | June |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA48891.2023.10161515 |
| Event Name: | IEEE International Conference on Robotics and Automation (ICRA) |
| Event Place: | London |
| Address: | Piscataway, NJ |
| Award Paper: | Outstanding locomotion paper award |
| ISBN: | 979-8-3503-2366-5 |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/10161515 |
| Links: |
Youtube
Edmond CAD |
| Video: | |
| Attachments: | |
|
BibTex @conference{icra2023dlg,
title = {Multi-segmented Adaptive Feet for Versatile Legged Locomotion in Natural Terrain},
author = {Chatterjee, Abhishek and Mo, An and Kiss, Bernadett and Goenen, Emre Cemal and Badri-Spr{\"o}witz, Alexander},
booktitle = {2023 IEEE International Conference on Robotics and Automation (ICRA 2023)},
pages = {1162--1169 },
publisher = {IEEE},
address = {Piscataway, NJ},
month = jun,
year = {2023},
doi = {10.1109/ICRA48891.2023.10161515},
url = {https://ieeexplore.ieee.org/document/10161515},
month_numeric = {6}
}
|
|