2023
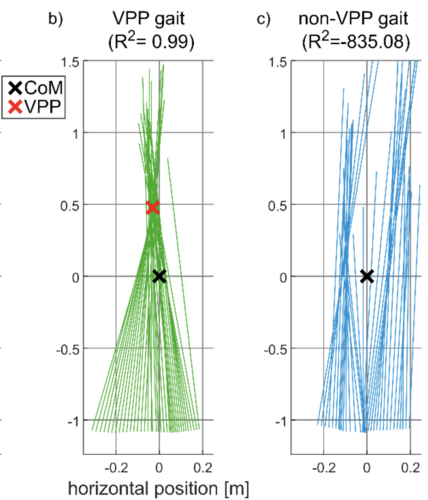
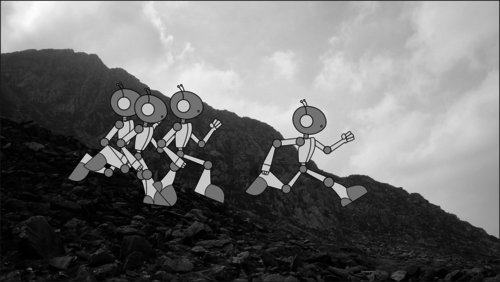
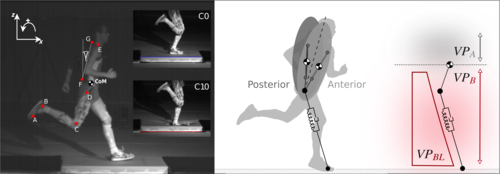
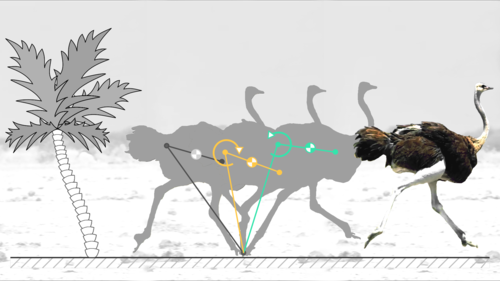
Virtual pivot point in human walking: always experimentally observed but simulations suggest it may not be necessary for stability
Schreff, L., Haeufle, D. F. B., Badri-Spröwitz, A., Vielemeyer, J., Müller, R.
Journal of Biomechanics, 153, May 2023 (article)
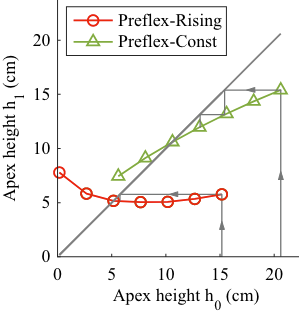
Muscle prestimulation tunes velocity preflex in simulated perturbed hopping
Izzi, F., Mo, A., Schmitt, S., Badri-Spröwitz, A., Häufle, D.
Scientific Reports, 13, pages: 4559, Nature Publishing Group, March 2023 (article)
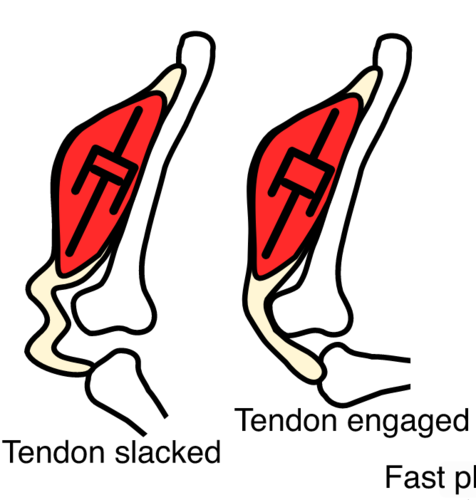
Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
Mo, A., Izzi, F., Gönen, E. C., Häufle, D., Badri-Spröwitz, A.
Scientific Reports, 13, pages: 3290, Nature Publishing Group, February 2023 (article)
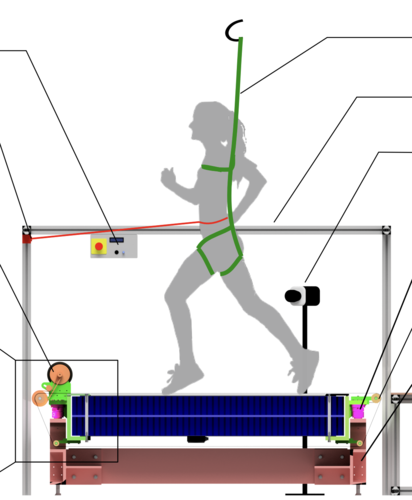
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
2023 (unpublished) Submitted
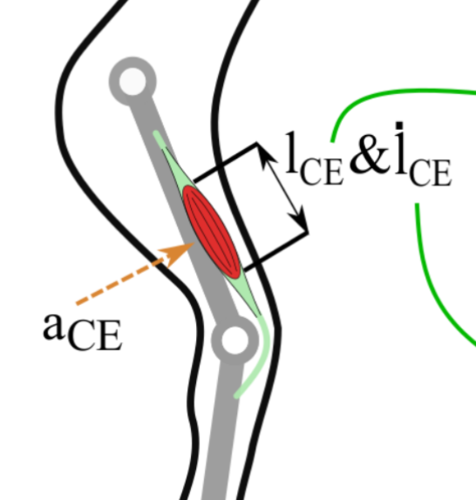
Muscle Preflex Response to Perturbations in locomotion: In-vitro experiments and simulations with realistic boundary conditions
Araz, M., Weidner, S., Izzi, F., Badri-Spröwitz, A., Siebert, T., Haeufle, D. F. B.
Frontiers in Bioengineering and Biotechnology, 11, 2023 (article)
2022
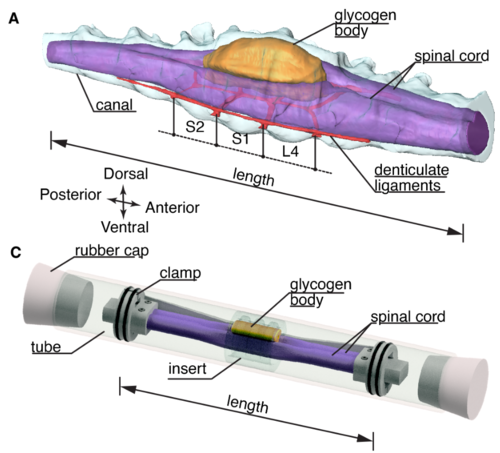
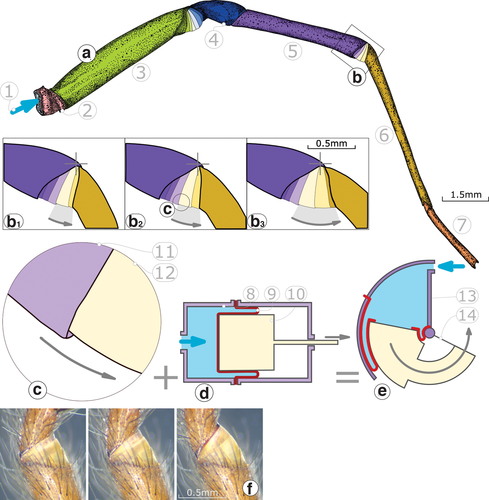
Physically Modelling Fluid- and Soft-tissue Mechanics of Lumbosacral Intraspinal Mechanosensing in Avians
Mo, A., Kamska, V., Bribiesca-Contreras, F., Hauptmann, J., Daley, M., Badri-Spröwitz, A.
arxiv, December 2022 (article) Submitted

Mechanical Design, Development and Testing of Bioinspired Legged Robots for Dynamic Locomotion
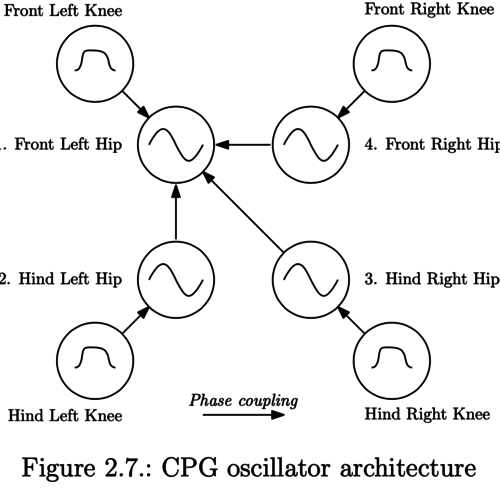
Learning plastic matching of robot dynamics in closed-loop central pattern generators
Ruppert, F., Badri-Spröwitz, A.
Nature Machine Intelligence, 4(7):652-660, July 2022 (article)
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Ruppert, F., Badri-Spröwitz, A.
Edmond, May 2022 (techreport)

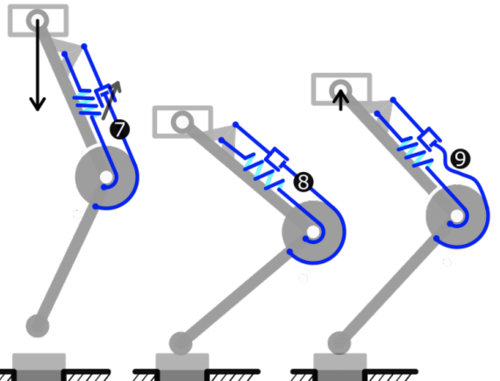
BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Science Robotics, 7(64):eabg4055, March 2022 (article)
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Edmond, March 2022 (techreport)
A Novel Spider-Inspired Rotary-Rolling Diaphragm Actuator with Linear Torque Characteristic and High Mechanical Efficiency
Hepp, J., Badri-Spröwitz, A.
Soft Robotics, 19(2):364-375, Mary Ann Liebert, Inc., 2022 (article)
2021
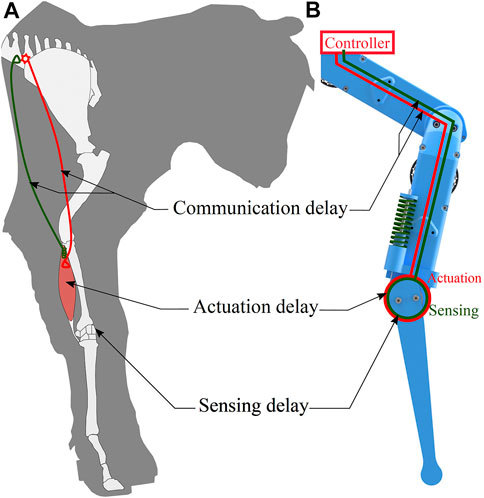
Hybrid Parallel Compliance Allows Robots to Operate With Sensorimotor Delays and Low Control Frequencies
Milad Shafiee Ashtiani, , Alborz Aghamaleki Sarvestani, , Badri-Spröwitz, A.
Frontiers in Robotics and AI, 8(na):645748, (Editors: Dai Owaki, Tohoku University, Japan), June 2021 (article)
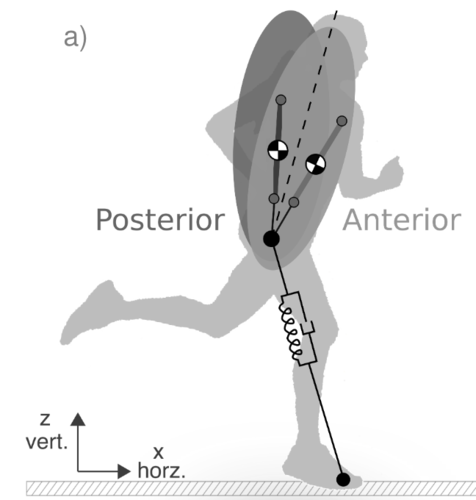
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
2020
Virtual Point Control for Step-down Perturbations and Downhill Slopes in Bipedal Running
Drama, Ö., Badri-Spröwitz, A.
Frontiers in Bioengineering and Biotechnology, 8, pages: 586534, Frontiers Media, December 2020 (article)
Postural stability in human running with step-down perturbations: an experimental and numerical study
Drama, Ö., Vielemeyer, J., Badri-Spröwitz, A., Müller, R.
Royal Society Open Science, 7(11):200570, November 2020 (article)
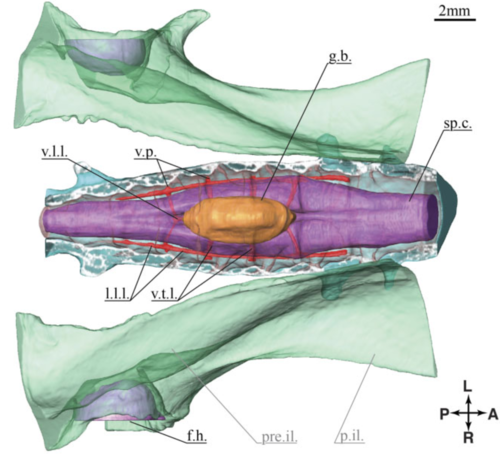
3D Anatomy of the Quail Lumbosacral Spinal Canal—Implications for Putative Mechanosensory Function
Kamska, V., Daley, M., Badri-Spröwitz, A.
Integrative Organismal Biology, 2(1):obaa037, Oxford University Press, October 2020 (article)
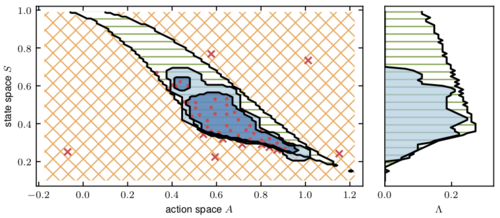
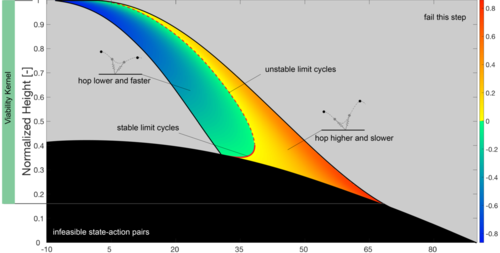
A Learnable Safety Measure
Heim, S., Rohr, A. V., Trimpe, S., Badri-Spröwitz, A.
Proceedings of the Conference on Robot Learning, 100, pages: 627-639, Proceedings of Machine Learning Research, (Editors: Kaelbling, Leslie Pack and Kragic, Danica and Sugiura, Komei), PMLR, Conference on Robot Learning, October 2020 (article)
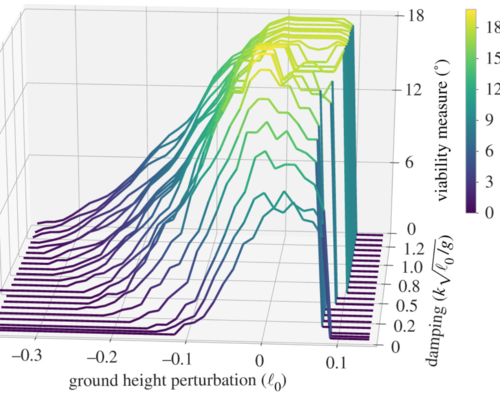
A little damping goes a long way: a simulation study of how damping influences task-level stability in running
Heim, S., Millard, M., Le Mouel, C., Badri-Spröwitz, A.
Biology Letters, 16(9):20200467, September 2020 (article)
Effective Viscous Damping Enables Morphological Computation in Legged Locomotion
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Frontiers in Robotics and AI, 7, pages: 110, August 2020 (article)
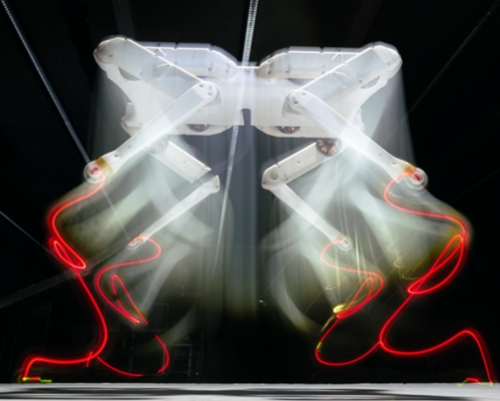
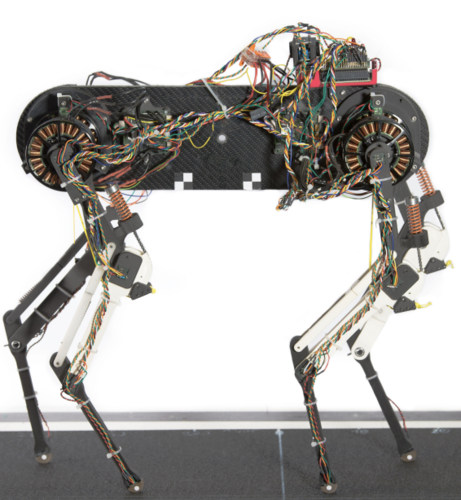
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
Grimminger, F., Meduri, A., Khadiv, M., Viereck, J., Wüthrich, M., Naveau, M., Berenz, V., Heim, S., Widmaier, F., Flayols, T., Fiene, J., Badri-Spröwitz, A., Righetti, L.
IEEE Robotics and Automation Letters, 5(2):3650-3657, IEEE, April 2020 (article)
Trunk pitch oscillations for energy trade-offs in bipedal running birds and robots
Drama, Ö., Badri-Spröwitz, A.
Bioinspiration & Biomimetics, 15(3):036013, March 2020 (article)
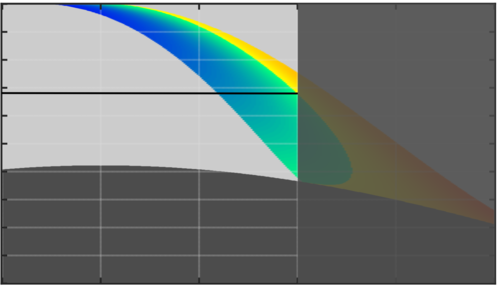
Viability in State-Action Space. Connecting Morphology, Control, and Learning
2019
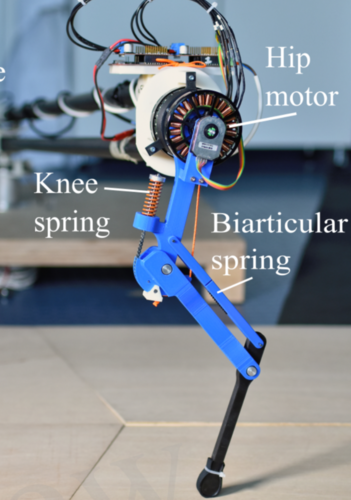
Series Elastic Behavior of Biarticular Muscle-Tendon Structure in a Robotic Leg
Ruppert, F., Badri-Spröwitz, A.
Frontiers in Neurorobotics, 64, pages: 13, 13, August 2019 (article)
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Steve Heim, , Spröwitz, A.
IEEE Transactions on Robotics (T-RO) , 35(4), pages: 939-952, August 2019 (article)
Electronics, Software and Analysis of a Bioinspired Sensorized Quadrupedal Robot
Entwicklung und Analyse neuartiger fluidischer Aktoren mit Rollmembran
Oncilla robot: a versatile open-source quadruped research robot with compliant pantograph legs
Sproewitz, A., Tuleu, A., Ajallooeian, M., Vespignani, M., Moeckel, R., Eckert, P., D’Haene, M., Degrave, J., Nordmann, A., Schrauwen, B., Steil, J., Ijspeert, A. J.
Frontiers in Robotics and AI, 5(67), June 2018, arXiv: 1803.06259 (article)
2017
Spinal joint compliance and actuation in a simulated bounding quadruped robot
Pouya, S., Khodabakhsh, M., Sproewitz, A., Ijspeert, A.
Autonomous Robots, pages: 437–452, Kluwer Academic Publishers, Springer, Dordrecht, New York, NY, February 2017 (article)
Evaluation of the passive dynamics of compliant legs with inertia
Györfi, B.
University of Applied Science Pforzheim, Germany, 2017 (mastersthesis)
2015
Exciting Engineered Passive Dynamics in a Bipedal Robot
Renjewski, D., Spröwitz, A., Peekema, A., Jones, M., Hurst, J.
{IEEE Transactions on Robotics and Automation}, 31(5):1244-1251, IEEE, New York, NY, 2015 (article)