Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
2023
Article
dlg
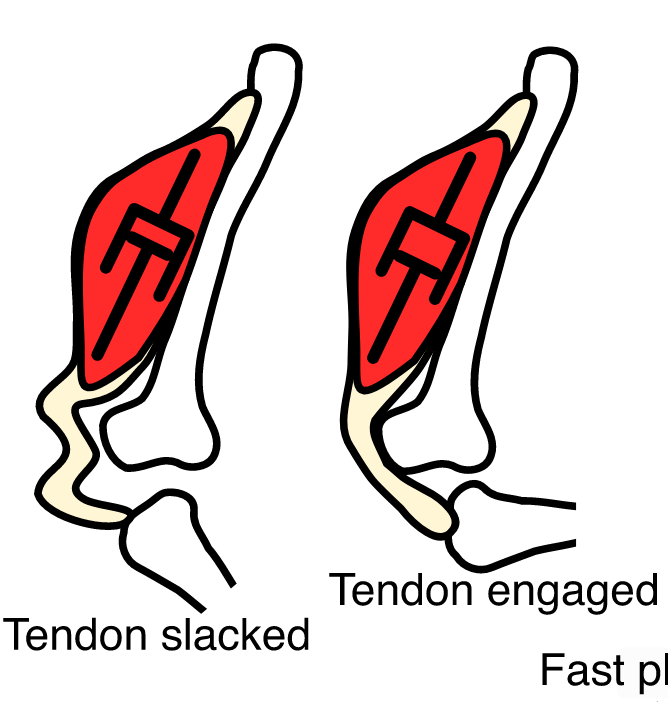
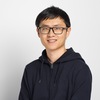
Animals run robustly in diverse terrain. This locomotion robustness is puzzling because axon conduction velocity is limited to a few ten meters per second. If reflex loops deliver sensory information with significant delays, one would expect a destabilizing effect on sensorimotor control. Hence, an alternative explanation describes a hierarchical structure of low-level adaptive mechanics and high-level sensorimotor control to help mitigate the effects of transmission delays. Motivated by the concept of an adaptive mechanism triggering an immediate response, we developed a tunable physical damper system. Our mechanism combines a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation. We characterize the slack damper mechanism mounted to a legged robot controlled in open-loop mode. The robot hops vertically and planar over varying terrains and perturbations. During forward hopping, slack-based damping improves faster perturbation recovery (up to 170%) at higher energetic cost (27%). The tunable slack mechanism auto-engages the damper during perturbations, leading to a perturbation-trigger damping, improving robustness at minimum energetic cost. With the results from the slack damper mechanism, we propose a new functional interpretation of animals' redundant muscle tendons as tunable dampers.
| Author(s): | An Mo and Fabio Izzi and Emre Cemal Gönen and Daniel Häufle and Alexander Badri-Spröwitz |
| Journal: | Scientific Reports |
| Volume: | 13 |
| Pages: | 3290 |
| Year: | 2023 |
| Month: | February |
| Publisher: | Nature Publishing Group |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| Digital: | True |
| DOI: | 10.1038/s41598-023-30318-3 |
| State: | Published |
| URL: | https://arxiv.org/abs/2212.00475 |
| Links: |
arxiv
Video Journal URL CAD and data |
| Video: | |
|
BibTex @article{slack2022,
title = {Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion},
author = {Mo, An and Izzi, Fabio and G{\"o}nen, Emre Cemal and H{\"a}ufle, Daniel and Badri-Spr{\"o}witz, Alexander},
journal = {Scientific Reports},
volume = {13},
pages = {3290},
publisher = {Nature Publishing Group},
month = feb,
year = {2023},
doi = {10.1038/s41598-023-30318-3},
url = {https://arxiv.org/abs/2212.00475},
month_numeric = {2}
}
|
|