2023
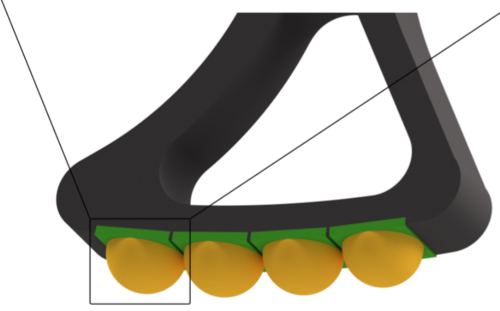
Multi-segmented Adaptive Feet for Versatile Legged Locomotion in Natural Terrain
(Outstanding locomotion paper award)
Chatterjee, A., Mo, A., Kiss, B., Goenen, E. C., Badri-Spröwitz, A.
2023 IEEE International Conference on Robotics and Automation (ICRA 2023), pages: 1162-1169 , IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA), June 2023 (conference)
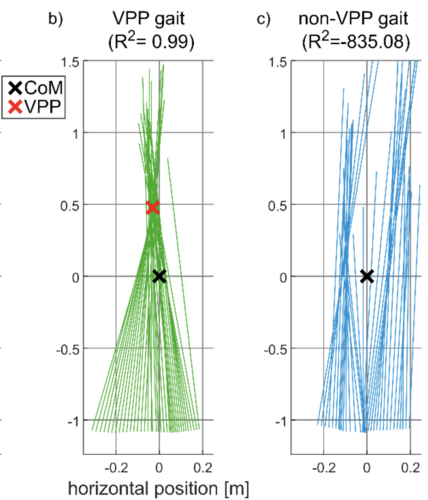
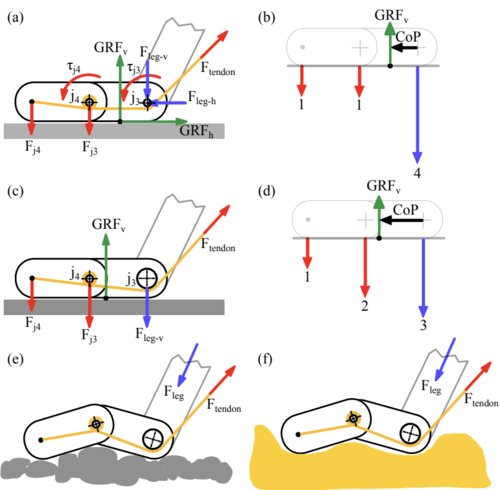
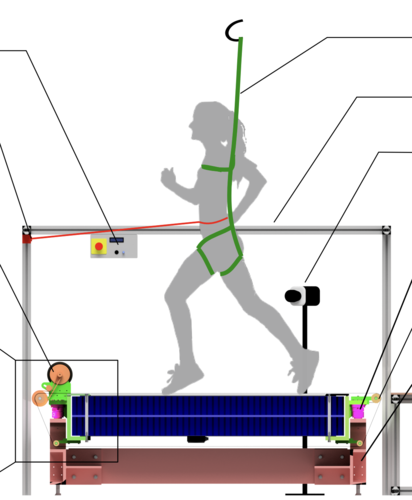
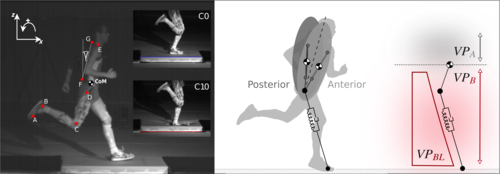
Virtual pivot point in human walking: always experimentally observed but simulations suggest it may not be necessary for stability
Schreff, L., Haeufle, D. F. B., Badri-Spröwitz, A., Vielemeyer, J., Müller, R.
Journal of Biomechanics, 153, May 2023 (article)
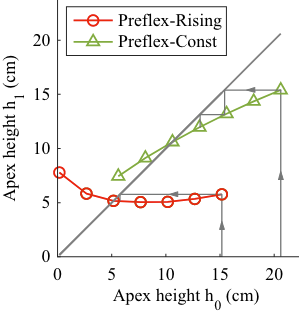
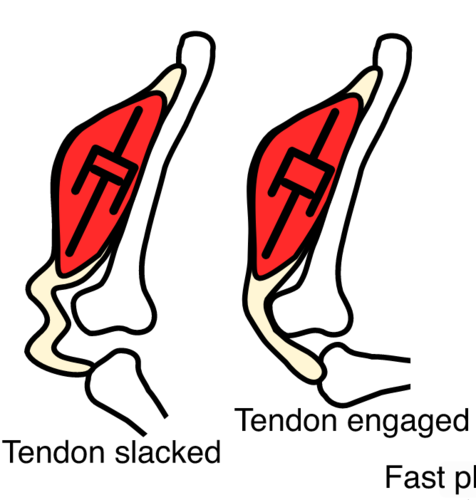
Muscle prestimulation tunes velocity preflex in simulated perturbed hopping
Izzi, F., Mo, A., Schmitt, S., Badri-Spröwitz, A., Häufle, D.
Scientific Reports, 13, pages: 4559, Nature Publishing Group, March 2023 (article)
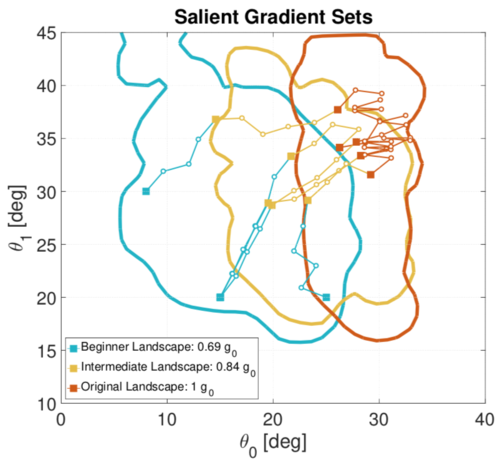
Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
Mo, A., Izzi, F., Gönen, E. C., Häufle, D., Badri-Spröwitz, A.
Scientific Reports, 13, pages: 3290, Nature Publishing Group, February 2023 (article)
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
2023 (unpublished) Submitted
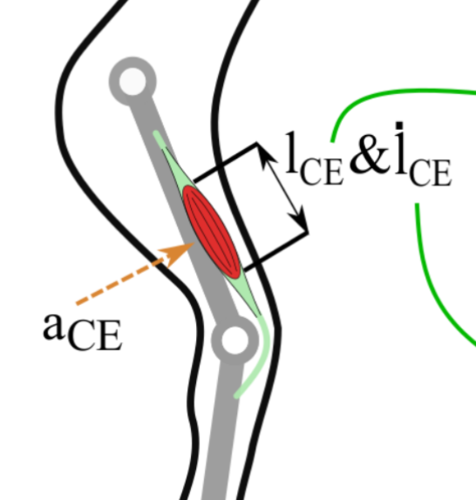
Muscle Preflex Response to Perturbations in locomotion: In-vitro experiments and simulations with realistic boundary conditions
Araz, M., Weidner, S., Izzi, F., Badri-Spröwitz, A., Siebert, T., Haeufle, D. F. B.
Frontiers in Bioengineering and Biotechnology, 11, 2023 (article)
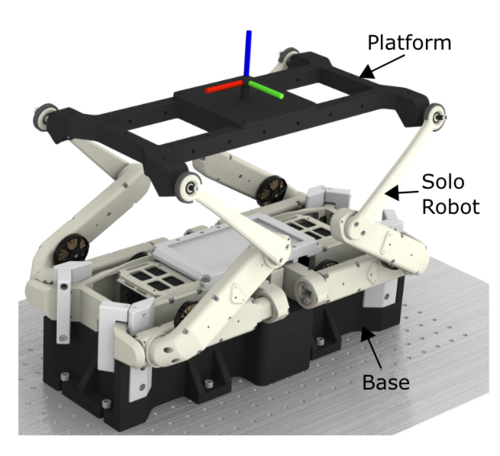
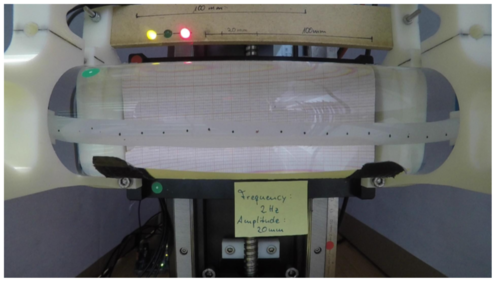
Upside down: affordable high-performance motion platform
Pradhan, N. M. S., Frank, P., Mo, A., Badri-Spröwitz, A.
arXiv, 2023 (conference) Accepted
2022
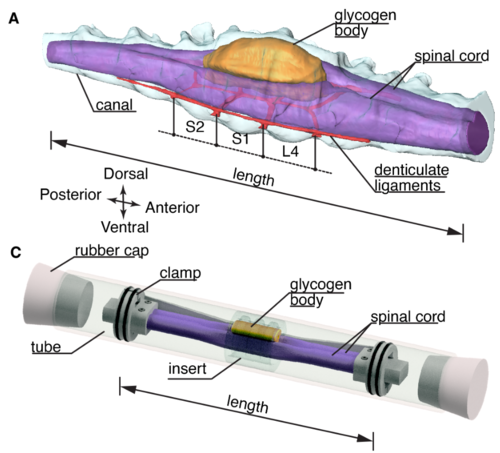
Physically Modelling Fluid- and Soft-tissue Mechanics of Lumbosacral Intraspinal Mechanosensing in Avians
Mo, A., Kamska, V., Bribiesca-Contreras, F., Hauptmann, J., Daley, M., Badri-Spröwitz, A.
arxiv, December 2022 (article) Submitted
Diaphragm Ankle Actuation for Efficient Series Elastic Legged Robot Hopping
Bolignari, M., Mo, A., Fontana, M., Badri-Spröwitz, A.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, IROS2022, October 2022 (conference) In press
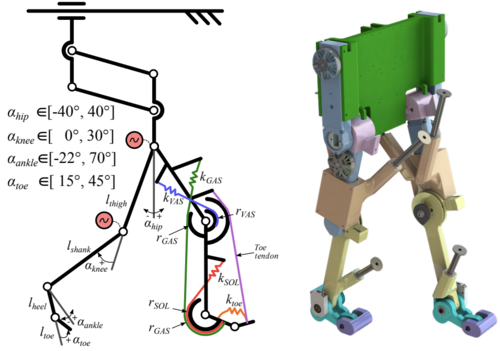
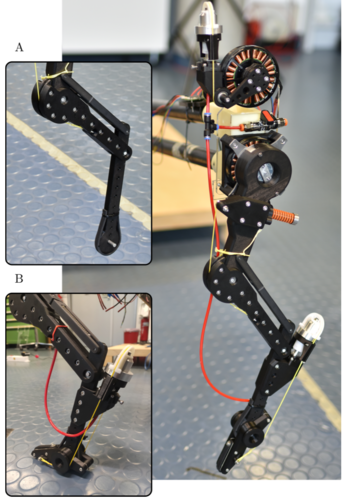
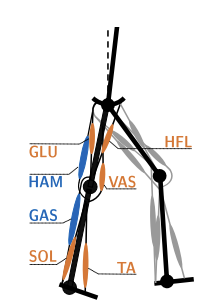
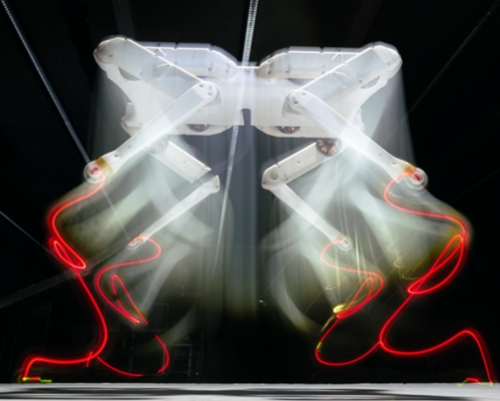
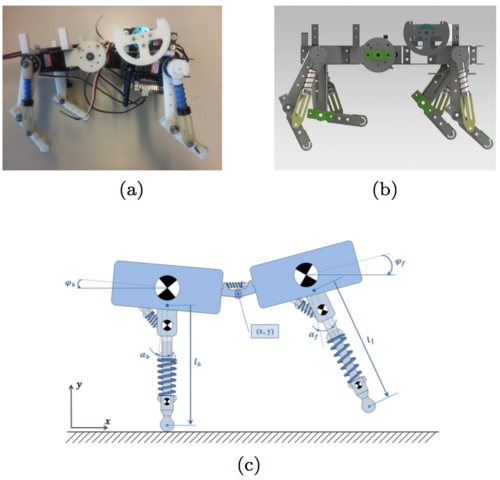
Gastrocnemius and Power Amplifier Soleus Spring-Tendons Achieve Fast Human-like Walking in a Bipedal Robot
Kiss, B., Gonen, E. C., Mo, A., Buchmann, A., Renjewski, D., Badri-Spröwitz, A.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, IROS2022, October 2022 (conference) In press
Power to the springs: Passive elements are sufficient to drive push-off in human walking
Buchmann, A., Kiss, B., Badri-Spröwitz, A., Renjewski, D.
In Robotics in Natural Settings , pages: 21-32, Lecture Notes in Networks and Systems, 530, (Editors: Cascalho, José M. and Tokhi, Mohammad Osman and Silva, Manuel F. and Mendes, Armando and Goher, Khaled and Funk, Matthias), Springer, Cham, 25th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machine (CLAWAR 2022), August 2022 (inproceedings)
Learning plastic matching of robot dynamics in closed-loop central pattern generators
Ruppert, F., Badri-Spröwitz, A.
Nature Machine Intelligence, 4(7):652-660, July 2022 (article)

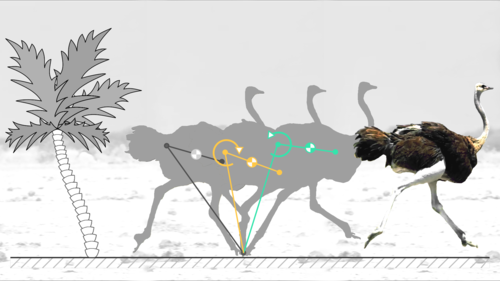
BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Science Robotics, 7(64):eabg4055, March 2022 (article)
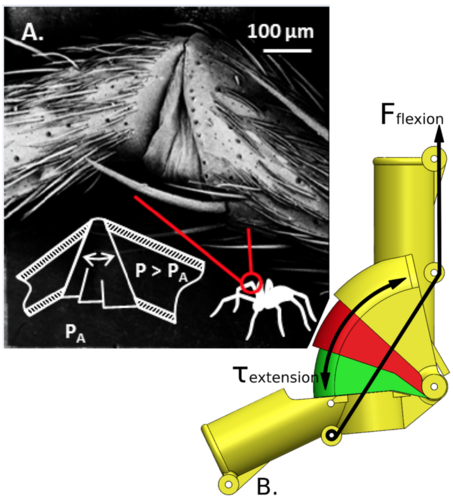
A Novel Spider-Inspired Rotary-Rolling Diaphragm Actuator with Linear Torque Characteristic and High Mechanical Efficiency
Hepp, J., Badri-Spröwitz, A.
Soft Robotics, 19(2):364-375, Mary Ann Liebert, Inc., 2022 (article)
2021
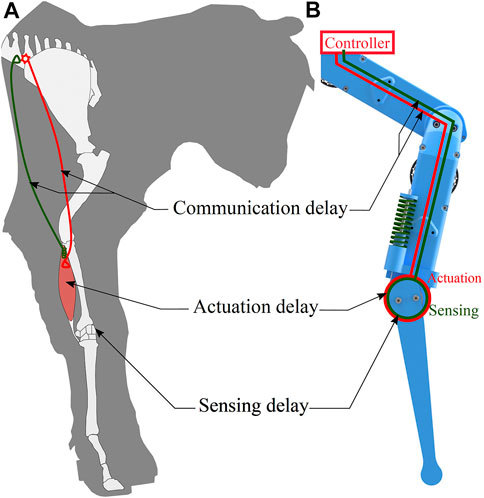
Hybrid Parallel Compliance Allows Robots to Operate With Sensorimotor Delays and Low Control Frequencies
Milad Shafiee Ashtiani, , Alborz Aghamaleki Sarvestani, , Badri-Spröwitz, A.
Frontiers in Robotics and AI, 8(na):645748, (Editors: Dai Owaki, Tohoku University, Japan), June 2021 (article)
A little damping goes a long way
Heim, S., Millard, M., Mouel, C. L., Badri-Spröwitz, A.
In Integrative and Comparative Biology, 61(Supplement 1):E367-E367, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021) , March 2021 (inproceedings)

Effects of tendon-network mechanisms on avian terrestrial locomotion
Contreras, F. B., Daley, M., Badri-Spröwitz, A.
In Integrative and Comparative Biology, 61(Supplement 1):E89-E90, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Developing a mechanical model for intraspinal mechanosensing in avians
Mo, A., Kamska, V., Contreras, F. B., Daley, M., Badri-Spröwitz, A.
In Integrative and Comparative Biology , 61(Supplement 1):E618-E619, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
Associating functional morphology of the lumbosacral organ and locomotion modalities in avians
Kamska, V., Contreras, F. B., Daley, M., Badri-Spröwitz, A.
In Integrative and Comparative Biology, 61(Supplement 1):E437-E437, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021), January 2021 (inproceedings)
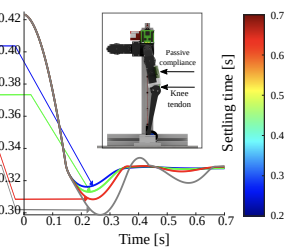
Tackling sensorimotor delays and low control update frequencies during drop impacts with hybrid parallel leg compliance
Ashtiani, M. S., Sarvestani, A. A., Badri-Spröwitz, A.
The 9.5th international symposium on Adaptive Motion of Animals and Machines. Ottawa,Canada (Virtual Platform). 2021-06-22/25. Adaptive Motion of Animals and Machines Organizing Committee., pages: 3, Adaptive Motion of Animals and Machines Organizing Committee, Adaptive Motion of Animals and Machines, 2021 (conference)
2020
Virtual Point Control for Step-down Perturbations and Downhill Slopes in Bipedal Running
Drama, Ö., Badri-Spröwitz, A.
Frontiers in Bioengineering and Biotechnology, 8, pages: 586534, Frontiers Media, December 2020 (article)
Postural stability in human running with step-down perturbations: an experimental and numerical study
Drama, Ö., Vielemeyer, J., Badri-Spröwitz, A., Müller, R.
Royal Society Open Science, 7(11):200570, November 2020 (article)
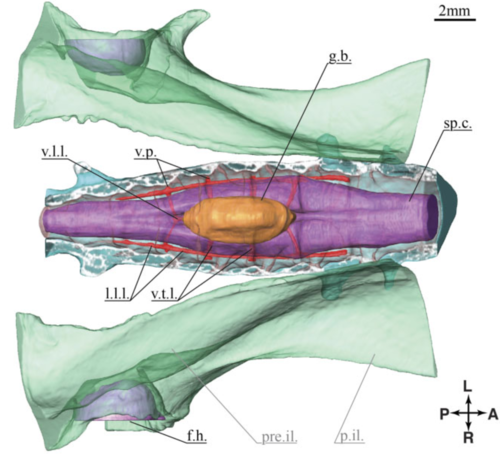
3D Anatomy of the Quail Lumbosacral Spinal Canal—Implications for Putative Mechanosensory Function
Kamska, V., Daley, M., Badri-Spröwitz, A.
Integrative Organismal Biology, 2(1):obaa037, Oxford University Press, October 2020 (article)
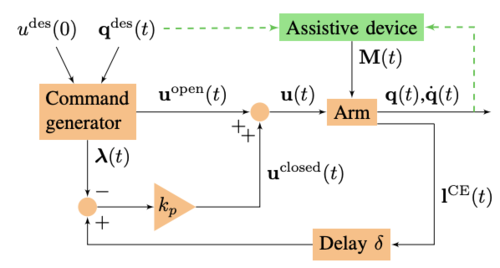
Simulating the response of a neuro-musculoskeletal model to assistive forces: implications for the design of wearables compensating for motor control deficits
Stollenmaier, K., Rist, I., Izzi, F., Haeufle, D. F.
In 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob 2020), pages: 779-784, IEEE, Piscataway, NJ, 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob 2020), October 2020 (inproceedings)
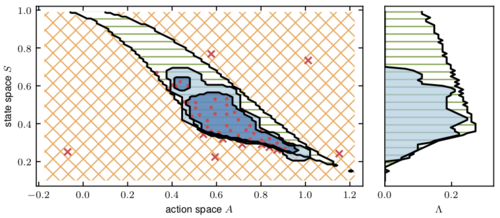
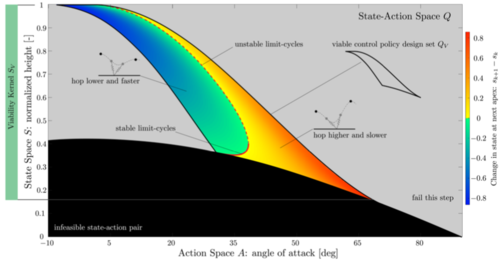
A Learnable Safety Measure
Heim, S., Rohr, A. V., Trimpe, S., Badri-Spröwitz, A.
Proceedings of the Conference on Robot Learning, 100, pages: 627-639, Proceedings of Machine Learning Research, (Editors: Kaelbling, Leslie Pack and Kragic, Danica and Sugiura, Komei), PMLR, Conference on Robot Learning, October 2020 (article)
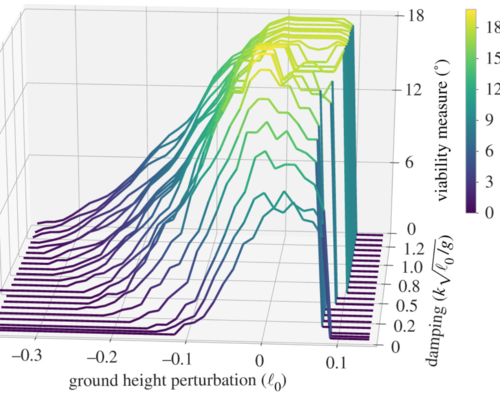
A little damping goes a long way: a simulation study of how damping influences task-level stability in running
Heim, S., Millard, M., Le Mouel, C., Badri-Spröwitz, A.
Biology Letters, 16(9):20200467, September 2020 (article)
Effective Viscous Damping Enables Morphological Computation in Legged Locomotion
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Frontiers in Robotics and AI, 7, pages: 110, August 2020 (article)
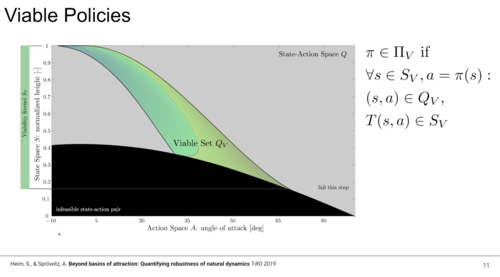
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Heim, S., Badri-Spröwitz, A.
May 2020 (talk)
FootTile: a Rugged Foot Sensor for Force and Center of Pressure Sensing in Soft Terrain
Ruppert, F., Badri-Spröwitz, A.
In 2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 4810-4816, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020) , 2020 (inproceedings)
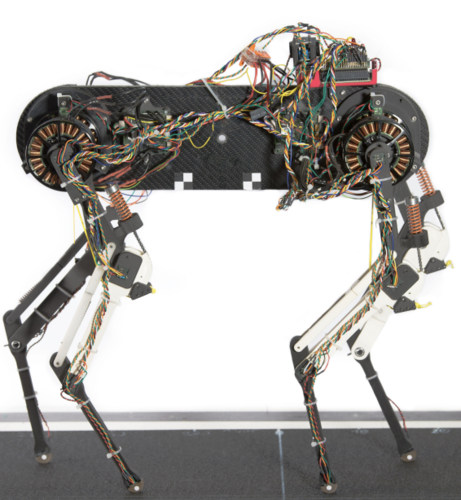
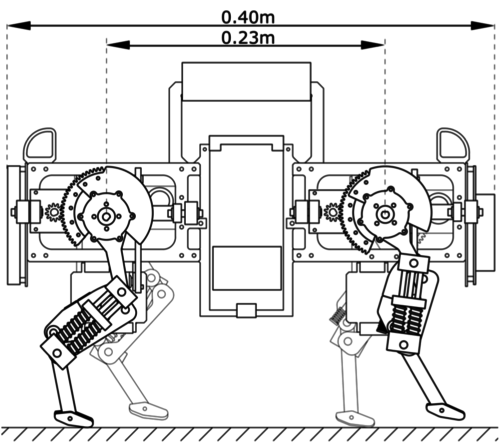
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
Grimminger, F., Meduri, A., Khadiv, M., Viereck, J., Wüthrich, M., Naveau, M., Berenz, V., Heim, S., Widmaier, F., Flayols, T., Fiene, J., Badri-Spröwitz, A., Righetti, L.
IEEE Robotics and Automation Letters, 5(2):3650-3657, IEEE, April 2020 (article)
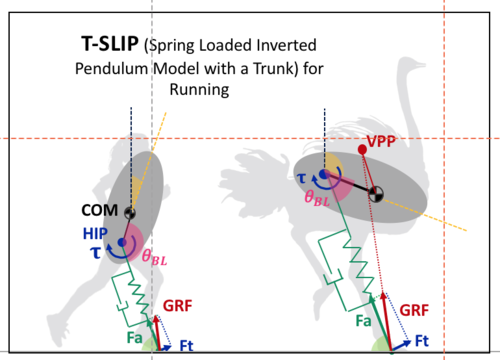
Trunk pitch oscillations for energy trade-offs in bipedal running birds and robots
Drama, Ö., Badri-Spröwitz, A.
Bioinspiration & Biomimetics, 15(3):036013, March 2020 (article)
2019
Trunk Pitch Oscillations for Joint Load Redistribution in Humans and Humanoid Robots
Drama, Ö., Badri-Spröwitz, A.
Proceedings of 2019 IEEE-RAS 19th International Conference on Humanoid Robots, pages: 531-536, IEEE, Humanoids, October 2019 (conference)
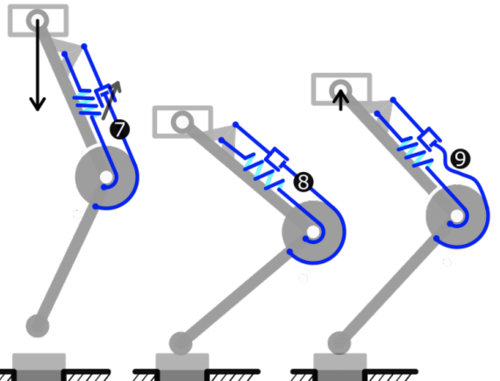
Series Elastic Behavior of Biarticular Muscle-Tendon Structure in a Robotic Leg
Ruppert, F., Badri-Spröwitz, A.
Frontiers in Neurorobotics, 64, pages: 13, 13, August 2019 (article)
The positive side of damping
Heim, S., Millard, M., Le Mouel, C., Sproewitz, A.
Proceedings of AMAM, The 9th International Symposium on Adaptive Motion of Animals and Machines, August 2019 (conference)
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Steve Heim, , Spröwitz, A.
IEEE Transactions on Robotics (T-RO) , 35(4), pages: 939-952, August 2019 (article)
Quantifying the Robustness of Natural Dynamics: a Viability Approach
Heim, S., Sproewitz, A.
Proceedings of Dynamic Walking , Dynamic Walking , 2019 (conference)

Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
Badri-Spröwitz, A.
In pages: 167-175, Springer, 2019 (incollection)
2018
Oncilla robot: a versatile open-source quadruped research robot with compliant pantograph legs
Sproewitz, A., Tuleu, A., Ajallooeian, M., Vespignani, M., Moeckel, R., Eckert, P., D’Haene, M., Degrave, J., Nordmann, A., Schrauwen, B., Steil, J., Ijspeert, A. J.
Frontiers in Robotics and AI, 5(67), June 2018, arXiv: 1803.06259 (article)
Learning from Outside the Viability Kernel: Why we Should Build Robots that can Fail with Grace
Heim, S., Sproewitz, A.
Proceedings of SIMPAR 2018, pages: 55-61, IEEE, 2018 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), May 2018 (conference)
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Drama, Ö.
Dynamic Walking Conference, May 2018 (talk)
Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware
Heim, S., Ruppert, F., Sarvestani, A., Sproewitz, A.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018, pages: 5076-5081, IEEE, International Conference on Robotics and Automation, May 2018 (inproceedings)
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
2017
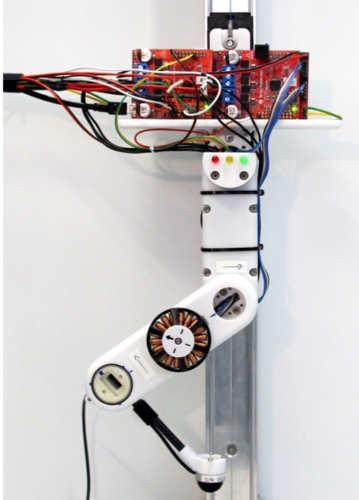
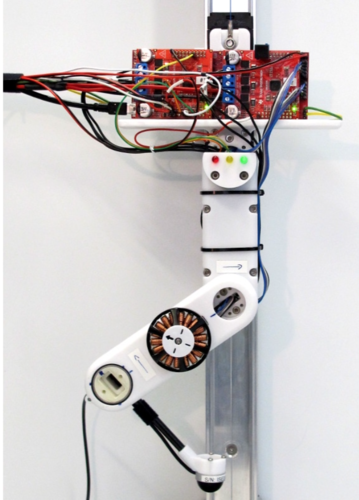
Scalable Pneumatic and Tendon Driven Robotic Joint Inspired by Jumping Spiders
Sproewitz, A., Göttler, C., Sinha, A., Caer, C., Öztekin, M. U., Petersen, K., Sitti, M.
In Proceedings 2017 IEEE International Conference on Robotics and Automation (ICRA), pages: 64-70, IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
Spinal joint compliance and actuation in a simulated bounding quadruped robot
Pouya, S., Khodabakhsh, M., Sproewitz, A., Ijspeert, A.
Autonomous Robots, pages: 437–452, Kluwer Academic Publishers, Springer, Dordrecht, New York, NY, February 2017 (article)
Linking Mechanics and Learning
Heim, S., Grimminger, F., Drama, Ö., Spröwitz, A.
In Proceedings of Dynamic Walking 2017, 2017 (inproceedings)
Is Growing Good for Learning?
Heim, S., Spröwitz, A.
Proceedings of the 8th International Symposium on Adaptive Motion of Animals and Machines AMAM2017, 2017 (conference)
2016
On designing an active tail for legged robots: simplifying control via decoupling of control objectives
Heim, S. W., Ajallooeian, M., Eckert, P., Vespignani, M., Ijspeert, A. J.
Industrial Robot: An International Journal, 43, pages: 338-346, Emerald Group Publishing Limited, 2016 (article)
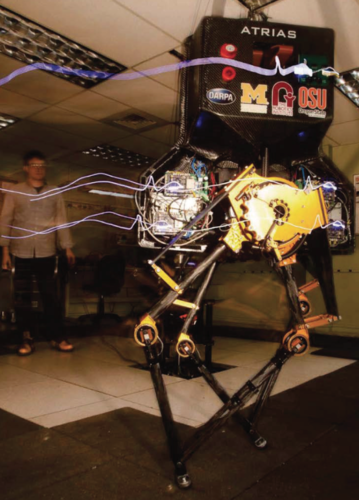
ATRIAS: Design and validation of a tether-free 3D-capable spring-mass bipedal robot
Hubicki, C., Grimes, J., Jones, M., Renjewski, D., Spröwitz, A., Abate, A., Hurst, J.
{The International Journal of Robotics Research}, 35(12):1497-1521, Sage Publications, Inc., Cambridge, MA, 2016 (article)