Impact of Trunk Orientation for Dynamic Bipedal Locomotion
2018
Talk
dlg
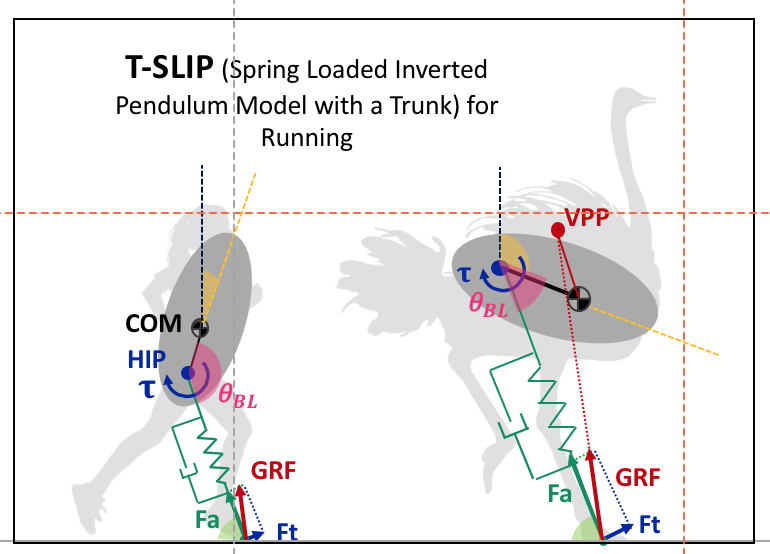
Impact of trunk orientation for dynamic bipedal locomotion My research revolves around investigating the functional demands of bipedal running, with focus on stabilizing trunk orientation. When we think about postural stability, there are two critical questions we need to answer: What are the necessary and sufficient conditions to achieve and maintain trunk stability? I am concentrating on how morphology affects control strategies in achieving trunk stability. In particular, I denote the trunk pitch as the predominant morphology parameter and explore the requirements it imposes on a chosen control strategy. To analyze this, I use a spring loaded inverted pendulum model extended with a rigid trunk, which is actuated by a hip motor. The challenge for the controller design here is to have a single hip actuator to achieve two coupled tasks of moving the legs to generate motion and stabilizing the trunk. I enforce orthograde and pronograde postures and aim to identify the effect of these trunk orientations on the hip torque and ground reaction profiles for different control strategies.
| Author(s): | Özge Drama |
| Year: | 2018 |
| Month: | May |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Talk (talk) |
| Paper Type: | Video |
| Event Name: | Dynamic Walking Conference |
| Event Place: | Pensacola, Florida, USA |
| URL: | http://robots.ihmc.us/dwc2018-proceedings |
| Links: |
Impact of trunk orientation for dynamic bipedal locomotion [DW 2018]
|
| Video: | |
|
BibTex @talk{2018_DW_TrunkOrientation,
title = {Impact of Trunk Orientation for Dynamic Bipedal Locomotion},
author = {Drama, Özge},
month = may,
year = {2018},
doi = {},
url = {http://robots.ihmc.us/dwc2018-proceedings},
month_numeric = {5}
}
|
|