Videos

24 May 2023
00:12 Minutes
Ecowalker robot on its way to AMAM 2023 (Kobe, June 6-9, 2023)

3 April 2023
01:03 Minutes
Upside Down: affordable high-performance motion platform

26 February 2023
02:15 Minutes
Slack damper mechanism enables robust and efficient legged hopping
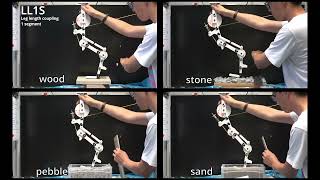
4 February 2023
02:10 Minutes
Multi-segmented Robot Feet Adapt to Natural Terrain

22 December 2022
00:22 Minutes
Ecowalker with Xmas lights outfit

29 July 2022
00:25 Minutes
SELDA actuated robot leg hopping
29 July 2022
01:52 Minutes
Fast Human-like Walking in a Bipedal Robot
18 July 2022
02:22 Minutes
Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators

18 March 2022
00:51 Minutes
BirdBot at 1.5Hz locomotion frequency, high speed recording

16 March 2022
03:20 Minutes
BirdBot, an energy-efficient robot leg inspired by birds' legs
23 December 2021
00:18 Minutes
Cheetah-cub MOCAP tracked with traces in Mokka
23 December 2021
00:45 Minutes
Cheetah-cub robot, simulation model at increasing locomotion frequency
23 December 2021
00:56 Minutes
Cheetah-cub ground reaction forces individual legs

23 December 2021
00:18 Minutes
Cheetah-cub sideview and slowmo

23 December 2021
00:03 Minutes
Cheetah-cub in side view, with trunk oscillations tracked
23 December 2021
00:37 Minutes
Scalable Pneumatic and Tendon Driven Robotic Joint Inspired by Jumping Spiders - raw video

5 November 2021
04:39 Minutes
Series Elastic Behavior of Biarticular Muscle-Tendon Structure in a Robotic Leg - Robustness

29 October 2021
00:38 Minutes
FootTile sensor for legged robots dropping into mud

29 October 2021
00:31 Minutes
FootTile sensor dropping into seeds granular media

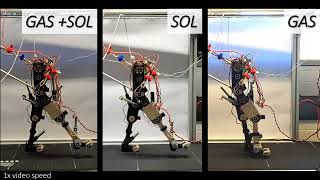
28 October 2021
00:57 Minutes
Series Elastic Behavior of Biarticular Muscle-Tendon Structure in a Robotic Leg - Stepdown

26 October 2021
00:40 Minutes
Oncilla robot Multimedia Extension 4

25 June 2021
00:38 Minutes
Spider-leg inspires new, rotary diaphragm actuator

23 June 2021
00:18 Minutes
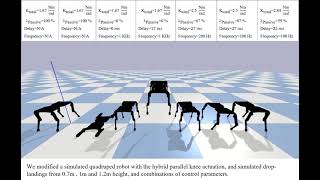
Video2 Hybrid Parallel Compliance Allows Robots to Operate With Sensorimotor Delays and Low Control
23 June 2021
02:00 Minutes
Video1 Hybrid Parallel Compliance Allows Robots to Operate With Sensorimotor Delays and Low Control
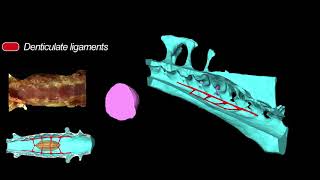
21 December 2020
00:43 Minutes
3D Anatomy of the Quail Lumbosacral Spinal Canal - Implications for Putative Mechanosensory Function
21 December 2020
09:25 Minutes
A little damping goes a long way - SICB2021 presentation

22 September 2020
00:46 Minutes
Effective Viscous Damping Enables Morphological Computation in Legged Locomotion

6 June 2020
04:42 Minutes
Trunk Pitch Oscillations for Energy Trade-offs in Bipedal Running Birds and Robots
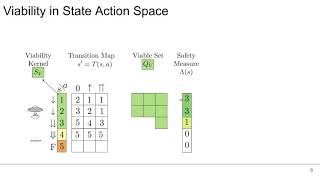
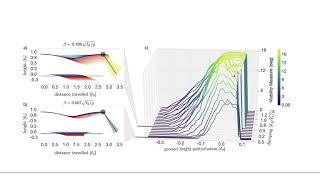
28 May 2020
09:01 Minutes
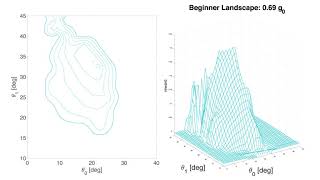
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics

28 May 2020
05:40 Minutes
FootTile: a Rugged Foot Sensor for Force and Center of Pressure Sensing in Soft Terrain (presenter)
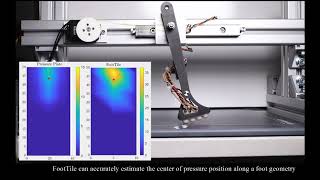
14 May 2020
01:10 Minutes
FootTile: a Rugged Foot Sensor for Force and Center of Pressure Sensing in Soft Terrain

6 February 2020
00:44 Minutes
ATRIAS robot walking outside.

6 February 2020
00:19 Minutes
YaMoR modular robot, tripod configuration, random CPG parameter gait initialisation.

6 February 2020
00:40 Minutes
YaMoR modular robot, tripod gait, optimized CPG parameters.

6 February 2020
00:18 Minutes
YaMoR modular robots in snake configuration, optimised central pattern generator parameters.

6 February 2020
00:11 Minutes
YaMoR modular robot, snake configuration, random CPG parameter gait initialisation.

6 February 2020
00:32 Minutes
YaMoR modular robot, quadruped configuration, optimised CPG parameters

6 February 2020
00:27 Minutes
YaMoR modular robot, learning to locomote.

8 August 2019
00:44 Minutes
Biarticular Muscle-Tendon Structure in Hopping Robotic Leg
3 February 2018
01:59 Minutes
Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware

12 January 2018
02:00 Minutes
Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware

30 May 2017
03:26 Minutes
Scalable Pneumatic and Tendon Driven Robotic Joint Inspired by Jumping Spiders

26 July 2016
00:32 Minutes
Bobcat robot, a bounding quadruped robot with an active spine.

26 July 2016
01:21 Minutes
Cheetah-cub in slow motion running in the hallway
26 July 2016
00:12 Minutes
Cheetah-cub leg design, spring loaded pantograph legs

26 July 2016
00:54 Minutes
Cheetah-cub step down perturbation

26 July 2016
00:53 Minutes
Cheetah-cub level running

26 July 2016
00:32 Minutes