Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware
2018
Conference Paper
dlg
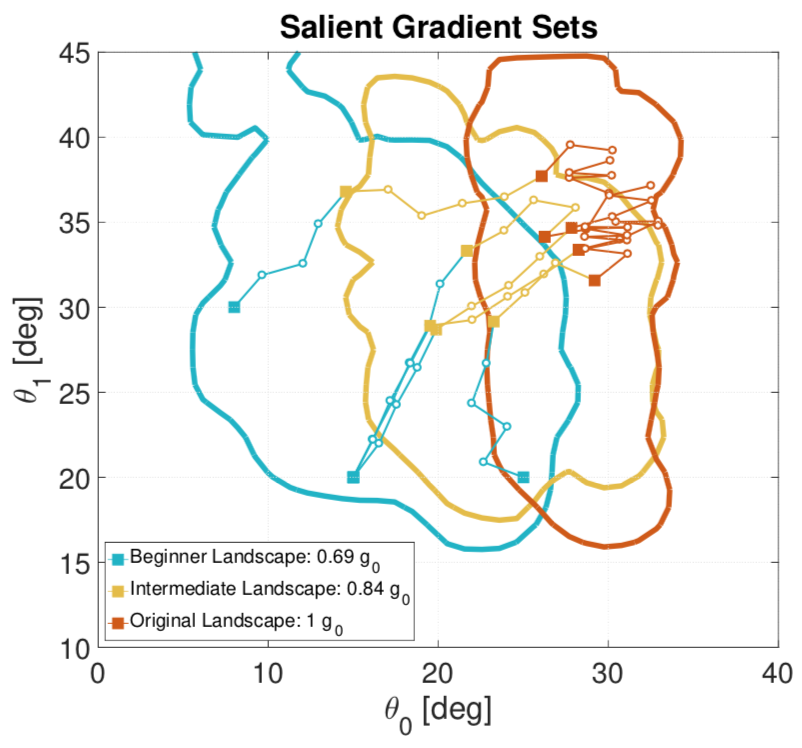
Learning instead of designing robot controllers can greatly reduce engineering effort required, while also emphasizing robustness. Despite considerable progress in simulation, applying learning directly in hardware is still challenging, in part due to the necessity to explore potentially unstable parameters. We explore the of concept shaping the reward landscape with training wheels; temporary modifications of the physical hardware that facilitate learning. We demonstrate the concept with a robot leg mounted on a boom learning to hop fast. This proof of concept embodies typical challenges such as instability and contact, while being simple enough to empirically map out and visualize the reward landscape. Based on our results we propose three criteria for designing effective training wheels for learning in robotics.
| Author(s): | Steve Heim and Felix Ruppert and Alborz Sarvestani and Alexander Sproewitz |
| Book Title: | Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018 |
| Pages: | 5076-5081 |
| Year: | 2018 |
| Month: | May |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Research Project(s): |
Animal-inspired robot legs
Shaping the reward landscape without shaping the reward |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Event Name: | International Conference on Robotics and Automation |
| Event Place: | Brisbane, Australia |
| ISBN: | 978-1-5386-3080-8/18 |
| State: | Published |
| URL: | https://arxiv.org/abs/1709.10273 |
| Links: |
Video Youtube
|
| Video: | |
|
BibTex @inproceedings{shaping_icra2018,
title = {Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware},
author = {Heim, Steve and Ruppert, Felix and Sarvestani, Alborz and Sproewitz, Alexander},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018},
pages = {5076-5081},
publisher = {IEEE},
month = may,
year = {2018},
doi = {},
url = {https://arxiv.org/abs/1709.10273},
month_numeric = {5}
}
|
|