Trunk Pitch Oscillations for Joint Load Redistribution in Humans and Humanoid Robots
2019
Conference Paper
dlg
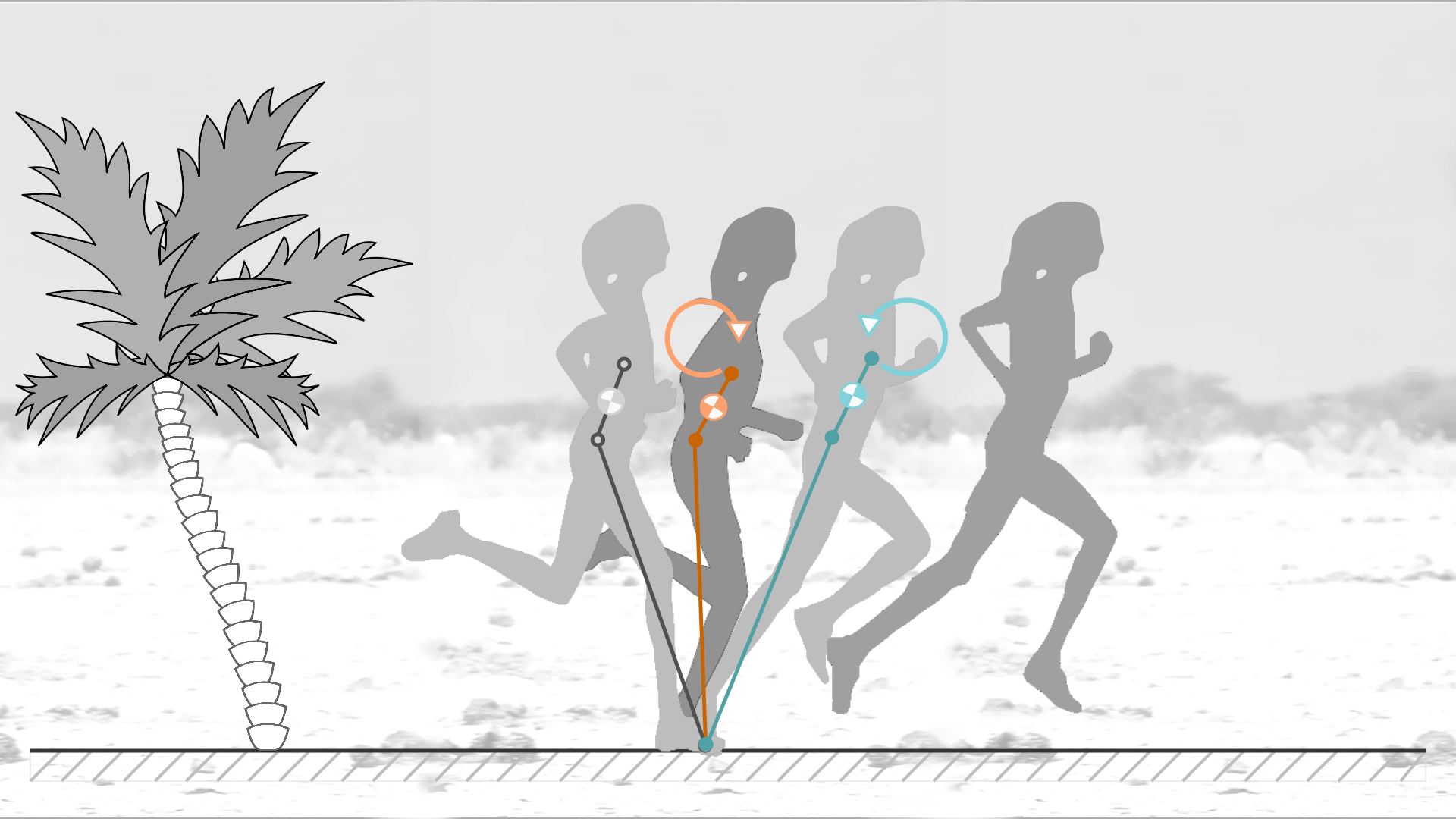
Creating natural-looking running gaits for humanoid robots is a complex task due to the underactuated degree of freedom in the trunk, which makes the motion planning and control difficult. The research on trunk movements in human locomotion is insufficient, and no formalism is known to transfer human motion patterns onto robots. Related work mostly focuses on the lower extremities, and simplifies the problem by stabilizing the trunk at a fixed angle. In contrast, humans display significant trunk motions that follow the natural dynamics of the gait. In this work, we use a spring-loaded inverted pendulum model with a trunk (TSLIP) together with a virtual point (VP) target to create trunk oscillations and investigate the impact of these movements. We analyze how the VP location and forward speed determine the direction and magnitude of the trunk oscillations. We show that positioning the VP below the center of mass (CoM) can explain the forward trunk pitching observed in human running. The VP below the CoM leads to a synergistic work between the hip and leg, reducing the leg loading. However, it comes at the cost of increased peak hip torque. Our results provide insights for leveraging the trunk motion to redistribute joint loads and potentially improve the energy efficiency in humanoid robots.
| Author(s): | Özge Drama and Alexander Badri-Spröwitz |
| Book Title: | Proceedings of 2019 IEEE-RAS 19th International Conference on Humanoid Robots |
| Pages: | 531-536 |
| Year: | 2019 |
| Month: | October |
| Day: | 15-17 |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Research Project(s): |
Trunk motion and virtual point control in bipedal locomotion
|
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| DOI: | 10.1109/Humanoids43949.2019.9035042 |
| Event Name: | Humanoids |
| Event Place: | Toronto, Canada |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/9035042 |
|
BibTex @conference{drama2019a,
title = {Trunk Pitch Oscillations for Joint Load Redistribution in Humans and Humanoid Robots},
author = {Drama, Özge and Badri-Spr{\"o}witz, Alexander},
booktitle = {Proceedings of 2019 IEEE-RAS 19th International Conference on Humanoid Robots},
pages = {531-536},
publisher = {IEEE},
month = oct,
year = {2019},
doi = {10.1109/Humanoids43949.2019.9035042},
url = {https://ieeexplore.ieee.org/document/9035042},
month_numeric = {10}
}
|
|