5 results
(View BibTeX file of all listed publications)
2020
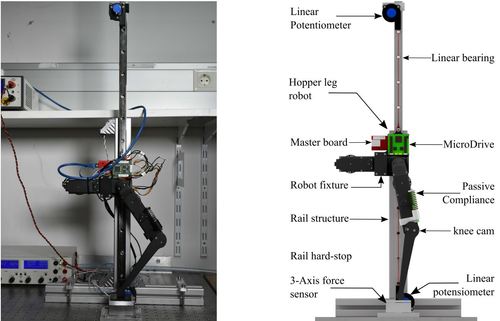
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
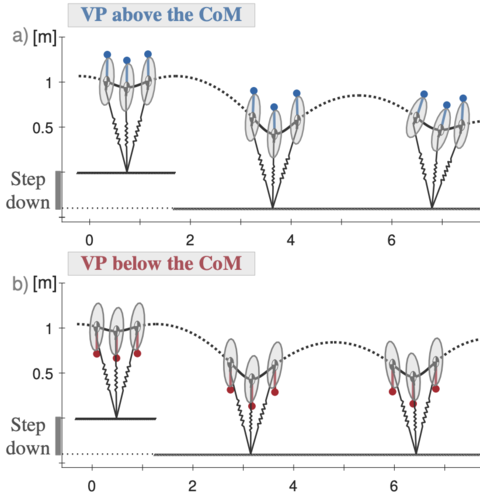
VP above or below? A new perspective on the story of the virtual point
Drama, Ö., Badri-Spröwitz, A.
Dynamic Walking, May 2020 (poster)
The spring inverted pendulum model with an extended trunk (TSLIP) is widely used to investigate the postural stability in bipedal locomotion [1, 2]. The challenge of the model is to define a hip torque that generates feasible gait patterns while stabilizing the floating trunk. The virtual point (VP) method is proposed as a simplified solution, where the hip torque is coupled to the passive compliant leg force via a virtual point. This geometric coupling is based on the assumption that the instantaneous ground reaction forces of the stance phase (GRF) intersect at a single virtual point.
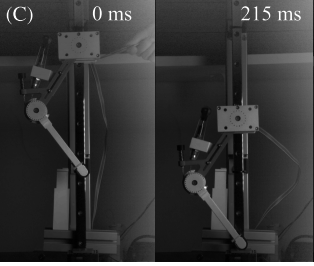
Viscous Damping in Legged Locomotion
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Dynamic Walking, May 2020 (poster)
Damping likely plays an essential role in legged animal locomotion, but remains an insufficiently understood mechanism. Intrinsic damping muscle forces can potentially add to the joint torque output during unexpected impacts, stabilise movements, convert the system’s energy, and reject unexpected perturbations.
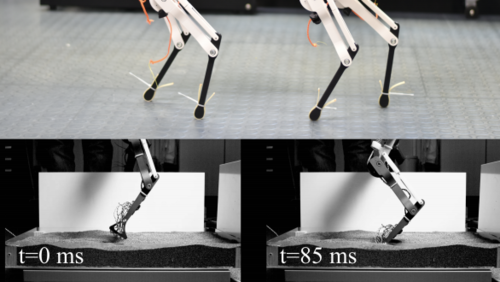
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Ruppert, F., Badri-Spröwitz, A.
Dynamic Walking, May 2020 (poster)
Recently developed and fully actuated, legged robots start showing exciting locomotion capabilities, but rely heavily on high-power actuators, high-frequency sensors, and complex locomotion controllers. The engineering solutions implemented in these legged robots are much different compared to animals. Vertebrate animals share magnitudes slower neurocontrol signal velocities [1] compared to their robot counterparts. Also, animals feature a plethora of cascaded and underactuated passive elastic structures [2].
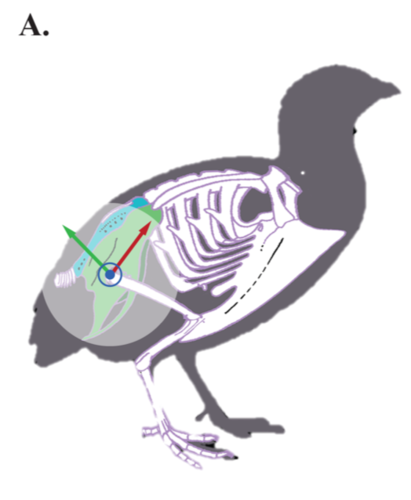
Potential for elastic soft tissue deformation and mechanosensory function within the lumbosacral spinal canal of birds
Kamska, V., Daley, M., Badri-Spröwitz, A.
Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), January 2020 (poster)