7 results
(View BibTeX file of all listed publications)
2022
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Ruppert, F., Badri-Spröwitz, A.
Edmond, May 2022 (techreport)
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Edmond, March 2022 (techreport)
2020
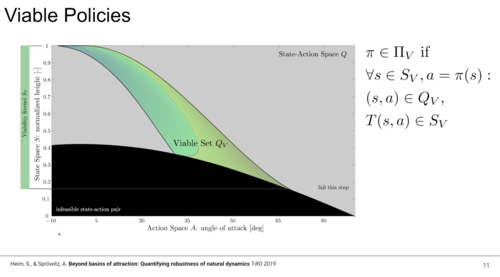
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Heim, S., Badri-Spröwitz, A.
May 2020 (talk)
2019

Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
Badri-Spröwitz, A.
In pages: 167-175, Springer, 2019 (incollection)
2018
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Drama, Ö.
Dynamic Walking Conference, May 2018 (talk)
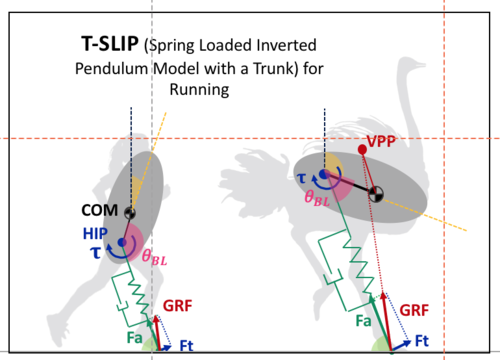
Impact of trunk orientation for dynamic bipedal locomotion
My research revolves around investigating the functional demands of bipedal running, with focus on stabilizing trunk orientation. When we think about postural stability, there are two critical questions we need to answer: What are the necessary and sufficient conditions to achieve and maintain trunk stability?
I am concentrating on how morphology affects control strategies in achieving trunk stability. In particular, I denote the trunk pitch as the predominant morphology parameter and explore the requirements it imposes on a chosen control strategy.
To analyze this, I use a spring loaded inverted pendulum model extended with a rigid trunk, which is actuated by a hip motor. The challenge for the controller design here is to have a single hip actuator to achieve two coupled tasks of moving the legs to generate motion and stabilizing the trunk. I enforce orthograde and pronograde postures and aim to identify the effect of these trunk orientations on the hip torque and ground reaction profiles for different control strategies.
2013
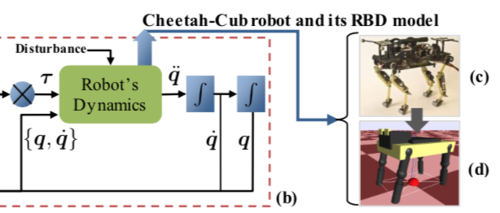
Motor Control Adaptation to Changes in Robot Body Dynamics for a Compliant Quadruped Robot
Pouya, S., Eckert, P., Spröwitz, A., Moc̈kel, R., Ijspeert, A. J.
In Biomimetic and Biohybrid Systems, 8064, pages: 434-437, Lecture Notes in Computer Science, Springer, Heidelberg, 2013 (incollection)
One of the major deficiencies of current robots in comparison to living beings is the ability to adapt to new conditions either resulting from environmental changes or their own dynamics. In this work we focus on situations where the robot experiences involuntary changes in its body particularly in its limbs’ inertia. Inspired from its biological counterparts we are interested in enabling the robot to adapt its motor control to the new system dynamics. To reach this goal, we propose two different control strategies and compare their performance when handling these modifications. Our results show substantial improvements in adaptivity to body changes when the robot is aware of its new dynamics and can exploit this knowledge in synthesising new motor control.
2010
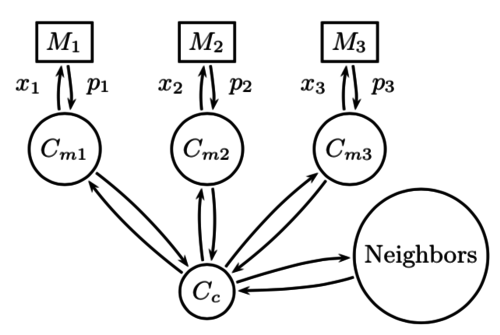
Distributed Online Learning of Central Pattern Generators in Modular Robots
Christensen, D. J., Spröwitz, A., Ijspeert, A. J.
In From Animals to Animats 11, 6226, pages: 402-412, Lecture Notes in Computer Science, Springer, Berlin, 2010, author: Doncieux, Stéphan (incollection)
In this paper we study distributed online learning of locomotion gaits for modular robots. The learning is based on a stochastic ap- proximation method, SPSA, which optimizes the parameters of coupled oscillators used to generate periodic actuation patterns. The strategy is implemented in a distributed fashion, based on a globally shared reward signal, but otherwise utilizing local communication only. In a physics-based simulation of modular Roombots robots we experiment with online learn- ing of gaits and study the effects of: module failures, different robot morphologies, and rough terrains. The experiments demonstrate fast online learning, typically 5-30 min. for convergence to high performing gaits (≈ 30 cm/sec), despite high numbers of open parameters (45-54). We conclude that the proposed approach is efficient, effective and a promising candidate for online learning on many other robotic platforms.