6 results
(View BibTeX file of all listed publications)
2022

Mechanical Design, Development and Testing of Bioinspired Legged Robots for Dynamic Locomotion
Eberhard Karls Universität Tübingen, Tübingen , November 2022 (phdthesis)
2021
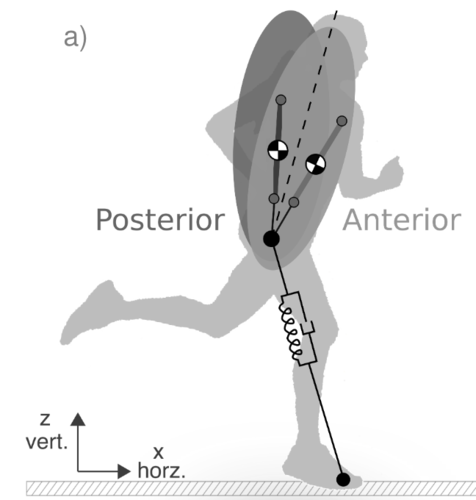
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
2020
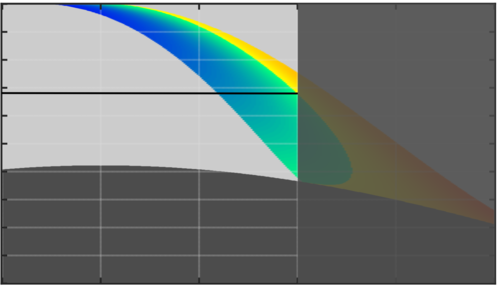
Viability in State-Action Space. Connecting Morphology, Control, and Learning
Eberhard Karls Universität Tübingen, Tübingen, February 2020 (phdthesis)
2018
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
Hochschule Harz, 2018 (thesis)
2010
Roombots: Design and Implementation of a Modular Robot for Reconfiguration and Locomotion
Spröwitz, A.
EPFL, Lausanne, Lausanne, 2010 (phdthesis)