2023
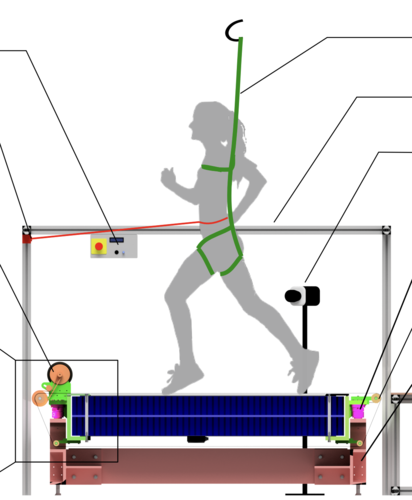
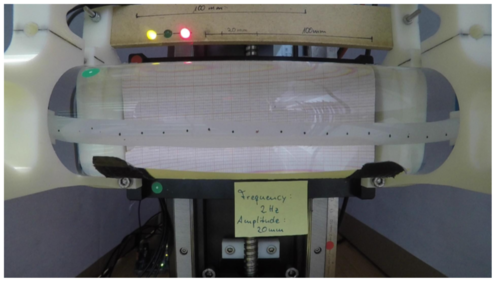
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
2023 (unpublished) Submitted
2022
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Ruppert, F., Badri-Spröwitz, A.
Edmond, May 2022 (techreport)
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Edmond, March 2022 (techreport)
2020
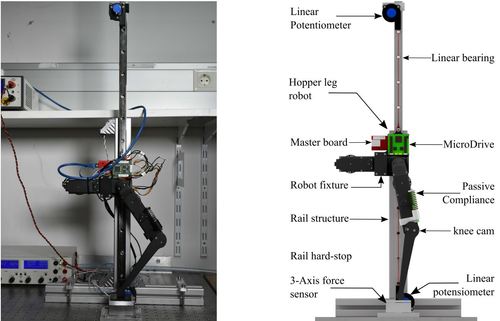
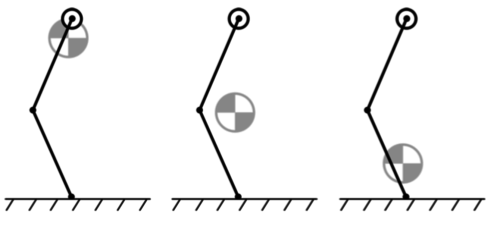
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
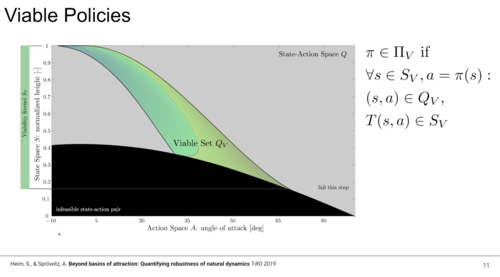
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Heim, S., Badri-Spröwitz, A.
May 2020 (talk)
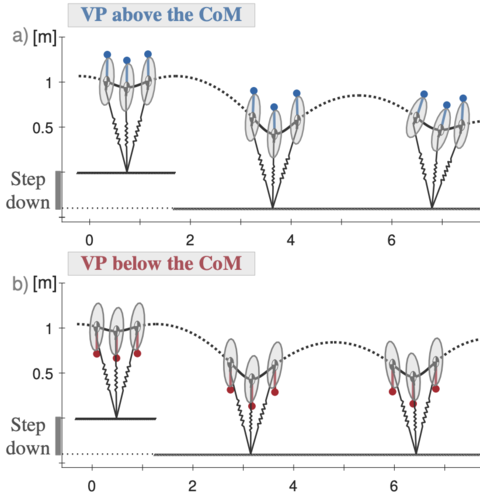
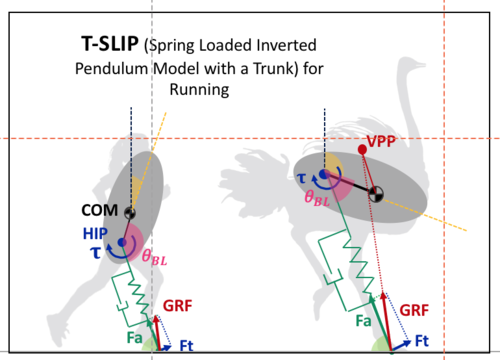
VP above or below? A new perspective on the story of the virtual point
Drama, Ö., Badri-Spröwitz, A.
Dynamic Walking, May 2020 (poster)
Viscous Damping in Legged Locomotion
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Dynamic Walking, May 2020 (poster)
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Ruppert, F., Badri-Spröwitz, A.
Dynamic Walking, May 2020 (poster)
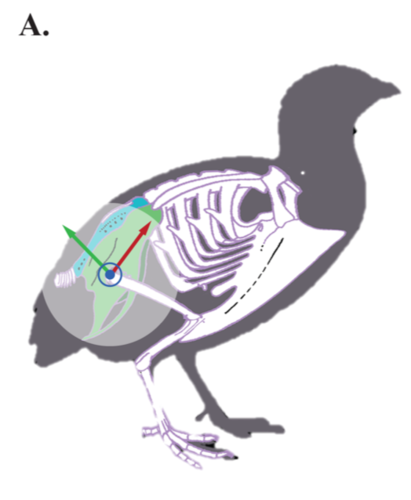
Potential for elastic soft tissue deformation and mechanosensory function within the lumbosacral spinal canal of birds
Kamska, V., Daley, M., Badri-Spröwitz, A.
Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), January 2020 (poster)
2019
Electronics, Software and Analysis of a Bioinspired Sensorized Quadrupedal Robot

Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
Badri-Spröwitz, A.
In pages: 167-175, Springer, 2019 (incollection)
Entwicklung und Analyse neuartiger fluidischer Aktoren mit Rollmembran

Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Drama, Ö.
Dynamic Walking Conference, May 2018 (talk)
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
2017
Evaluation of the passive dynamics of compliant legs with inertia
Györfi, B.
University of Applied Science Pforzheim, Germany, 2017 (mastersthesis)
2013
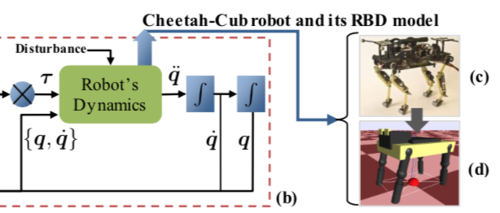
Motor Control Adaptation to Changes in Robot Body Dynamics for a Compliant Quadruped Robot
Pouya, S., Eckert, P., Spröwitz, A., Moc̈kel, R., Ijspeert, A. J.
In Biomimetic and Biohybrid Systems, 8064, pages: 434-437, Lecture Notes in Computer Science, Springer, Heidelberg, 2013 (incollection)
2010
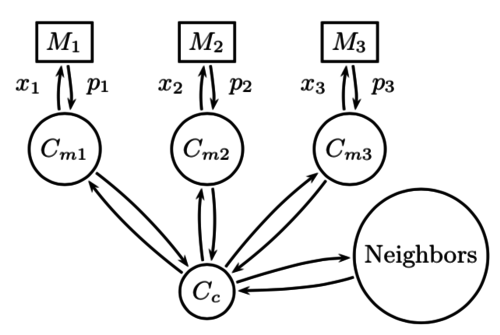
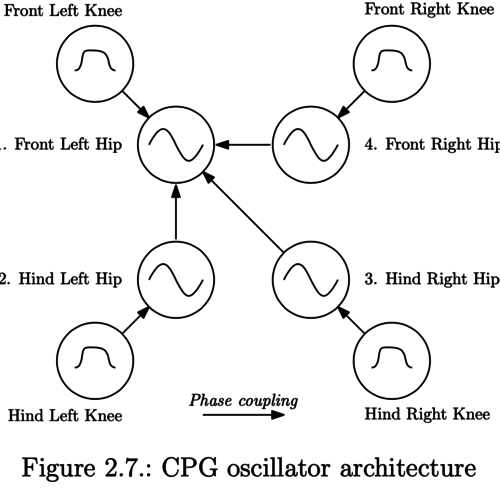
Distributed Online Learning of Central Pattern Generators in Modular Robots
Christensen, D. J., Spröwitz, A., Ijspeert, A. J.
In From Animals to Animats 11, 6226, pages: 402-412, Lecture Notes in Computer Science, Springer, Berlin, 2010, author: Doncieux, Stéphan (incollection)
2005
Adaptation of Central Pattern Generators to Preexisting Mechanical Structure
Spröwitz, A.
Technische Universität Ilmenau, Ilmenau, 2005 (mastersthesis)