Roombots: Reconfigurable Robots for Adaptive Furniture
2010
Article
dlg
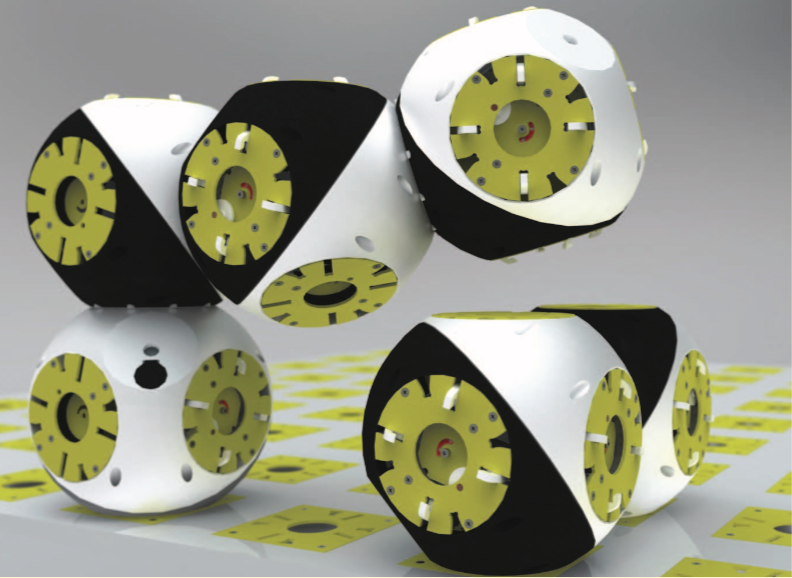
Imagine a world in which our furniture moves around like legged robots, interacts with us, and changes shape and function during the day according to our needs. This is the long term vision we have in the Roombots project. To work towards this dream, we are developing modular robotic modules that have rotational degrees of freedom for locomotion as well as active connection mechanisms for runtime reconfiguration. A piece of furniture, e.g. a stool, will thus be composed of several modules that activate their rotational joints together to implement locomotor gaits, and will be able to change shape, e.g. transforming into a chair, by sequences of attachments and detachments of modules. In this article, we firstly present the project and the hardware we are currently developing. We explore how reconfiguration from a configuration A to a configuration B can be controlled in a distributed fashion. This is done using metamodules-two Roombots modules connected serially-that use broadcast signals and connections to a structured ground to collectively build desired structures without the need of a centralized planner. We then present how locomotion controllers can be implemented in a distributed system of coupled oscillators-one per degree of freedom-similarly to the concept of central pattern generators (CPGs) found in the spinal cord of vertebrate animals. The CPGs are based on coupled phase oscillators to ensure synchronized behavior and have different output filters to allow switching between oscillations and rotations. A stochastic optimization algorithm is used to explore optimal CPG configurations for different simulated Roombots structures.
| Author(s): | Spröwitz, Alexander and Pouya, Soha and Bonardi, Stéphane and van den Kieboom, Jesse and Möckel, Rico and Billard, Aude and Dillenbourg, Pierre and Ijspeert, Auke |
| Journal: | Computational Intelligence Magazine, IEEE |
| Volume: | 5 |
| Number (issue): | 3 |
| Pages: | 20--32 |
| Year: | 2010 |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Article (article) |
| DOI: | 10.1109/MCI.2010.937320 |
|
BibTex @article{sprowitz_roombots_2010,
title = {Roombots: Reconfigurable Robots for Adaptive Furniture},
author = {Spr{\"o}witz, Alexander and Pouya, Soha and Bonardi, Stéphane and van den Kieboom, Jesse and M{\"o}ckel, Rico and Billard, Aude and Dillenbourg, Pierre and Ijspeert, Auke},
journal = {Computational Intelligence Magazine, IEEE},
volume = {5},
number = {3},
pages = {20--32},
year = {2010},
doi = {10.1109/MCI.2010.937320}
}
|
|