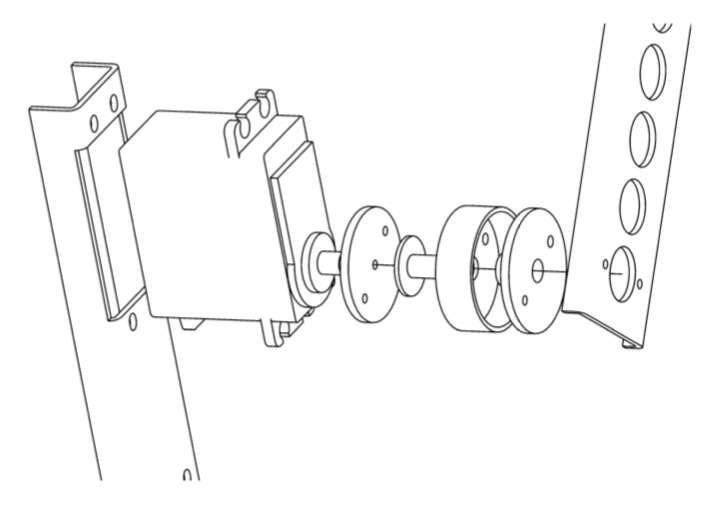
Passive compliance for a RC servo-controlled bouncing robot
2006
Article
dlg
A novel and low-cost passively compliant mechanism is described that can be used with RC servos to actuate legged robots in tasks involving high dynamic loads such as bouncing. Compliance is achieved by combining visco-elastic material and metal parts. Joint response to dynamic loads is evaluated using real-world experiments and force data are obtained from a Lagrangian analysis of the system. The experimental results demonstrate the applicative potential of this mechanism.
| Author(s): | Meyer, Friedrich and Spröwitz, Alexander and Berthouze, Luc |
| Journal: | Advanced Robotics |
| Volume: | 20 |
| Number (issue): | 8 |
| Pages: | 953--961 |
| Year: | 2006 |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1163/156855306777951429 |
|
BibTex @article{meyer_passive_2006,
title = {Passive compliance for a {RC} servo-controlled bouncing robot},
author = {Meyer, Friedrich and Spr{\"o}witz, Alexander and Berthouze, Luc},
journal = {Advanced Robotics},
volume = {20},
number = {8},
pages = {953--961},
year = {2006},
doi = {10.1163/156855306777951429}
}
|
|