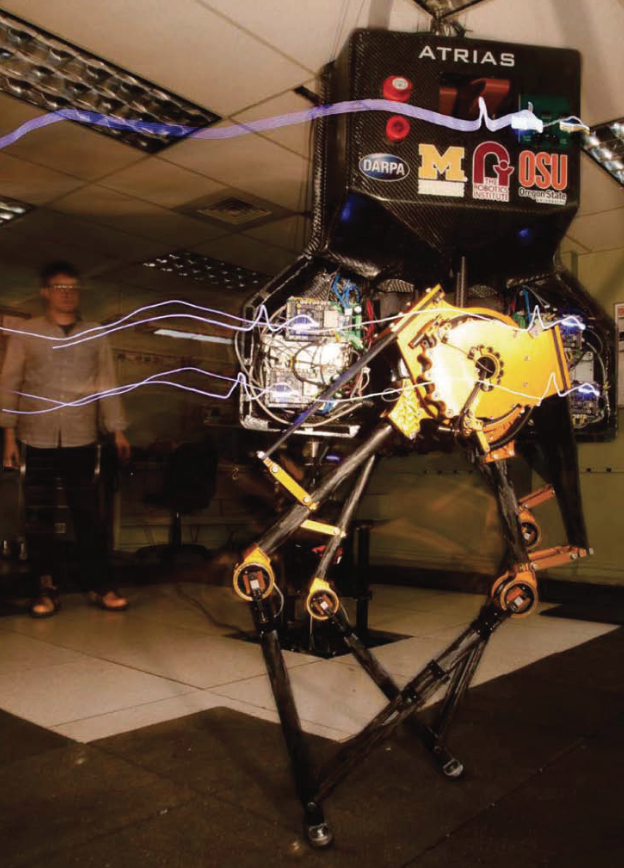
ATRIAS: Design and validation of a tether-free 3D-capable spring-mass bipedal robot
2016
Article
dlg
| Author(s): | Hubicki, Christian and Grimes, Jesse and Jones, Mikhail and Renjewski, Daniel and Spröwitz, Alexander and Abate, Andy and Hurst, Jonathan |
| Journal: | {The International Journal of Robotics Research} |
| Volume: | 35 |
| Number (issue): | 12 |
| Pages: | 1497--1521 |
| Year: | 2016 |
| Publisher: | Sage Publications, Inc. |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| Address: | Cambridge, MA |
| DOI: | 10.1177/0278364916648388 |
| State: | Published |
|
BibTex @article{hubicki2016atrias,
title = {ATRIAS: Design and validation of a tether-free 3D-capable spring-mass bipedal robot},
author = {Hubicki, Christian and Grimes, Jesse and Jones, Mikhail and Renjewski, Daniel and Spr{\"o}witz, Alexander and Abate, Andy and Hurst, Jonathan},
journal = {{The International Journal of Robotics Research}},
volume = {35},
number = {12},
pages = {1497--1521},
publisher = {Sage Publications, Inc.},
address = {Cambridge, MA},
year = {2016},
doi = {10.1177/0278364916648388}
}
|
|