Towards Dynamic Trot Gait Locomotion: Design, Control, and Experiments with Cheetah-cub, a Compliant Quadruped Robot
2013
Article
dlg
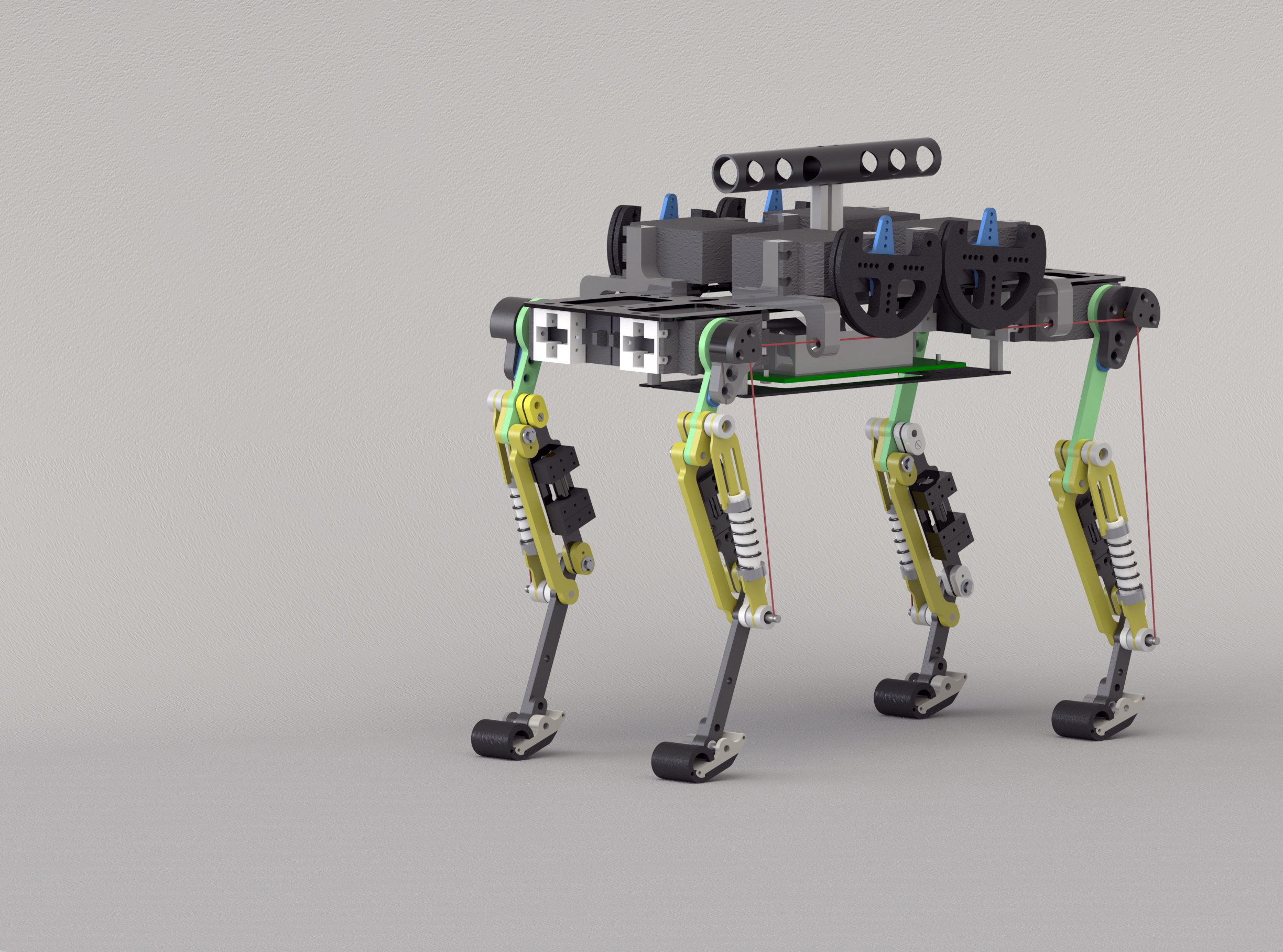
We present the design of a novel compliant quadruped robot, called Cheetah-cub, and a series of locomotion experiments with fast trotting gaits. The robot’s leg configuration is based on a spring-loaded, pantograph mechanism with multiple segments. A dedicated open-loop locomotion controller was derived and implemented. Experiments were run in simulation and in hardware on flat terrain and with a step down, demonstrating the robot’s self-stabilizing properties. The robot reached a running trot with short flight phases with a maximum Froude number of FR = 1.30, or 6.9 body lengths per second. Morphological parameters such as the leg design also played a role. By adding distal in-series elasticity, self- stability and maximum robot speed improved. Our robot has several advantages, especially when compared with larger and stiffer quadruped robot designs. (1) It is, to the best of the authors’ knowledge, the fastest of all quadruped robots below 30 kg (in terms of Froude number and body lengths per second). (2) It shows self-stabilizing behavior over a large range of speeds with open-loop control. (3) It is lightweight, compact, and electrically powered. (4) It is cheap, easy to reproduce, robust, and safe to handle. This makes it an excellent tool for research of multi-segment legs in quadruped robots.
| Author(s): | Spröwitz, Alexander and Tuleu, Alexandre and Vespignani, Massimo and Ajallooeian, Mostafa and Badri, Emilie and Ijspeert, Auke Jan |
| Journal: | {The International Journal of Robotics Research} |
| Volume: | 32 |
| Number (issue): | 8 |
| Pages: | 932--950 |
| Year: | 2013 |
| Publisher: | Sage Publications, Inc. |
| Department(s): | Dynamic Locomotion |
| Research Project(s): |
Animal-inspired robot legs
|
| Bibtex Type: | Article (article) |
| Address: | Cambridge, MA |
| DOI: | 10.1177/0278364913489205 |
| Language: | eng |
| Links: |
Youtube1
Youtube2 Youtube3 Youtube4 Youtube5 |
| Video: | |
| Video: | |
| Video: | |
| Video: | |
| Video: | |
|
BibTex @article{escidoc:2309869,
title = {Towards Dynamic Trot Gait Locomotion: Design, Control, and Experiments with Cheetah-cub, a Compliant Quadruped Robot},
author = {Spr{\"o}witz, Alexander and Tuleu, Alexandre and Vespignani, Massimo and Ajallooeian, Mostafa and Badri, Emilie and Ijspeert, Auke Jan},
journal = {{The International Journal of Robotics Research}},
volume = {32},
number = {8},
pages = {932--950},
publisher = {Sage Publications, Inc.},
address = {Cambridge, MA},
year = {2013},
doi = {10.1177/0278364913489205}
}
|
|