Cooperation work on Oncilla Open-Source Quadruped Robot
Open-Source Quadruped Robot
- 19 June 2018
- Dynamic Locomotion
Our publication behind the open-source Oncilla quadruped robot project, developed at the Biorobotics Laboratory at EPFL, Lausanne Switzerland and several other universities in Europe, just has been published.
For the paper, see here:
https://www.frontiersin.org/articles/10.3389/frobt.2018.00067/full
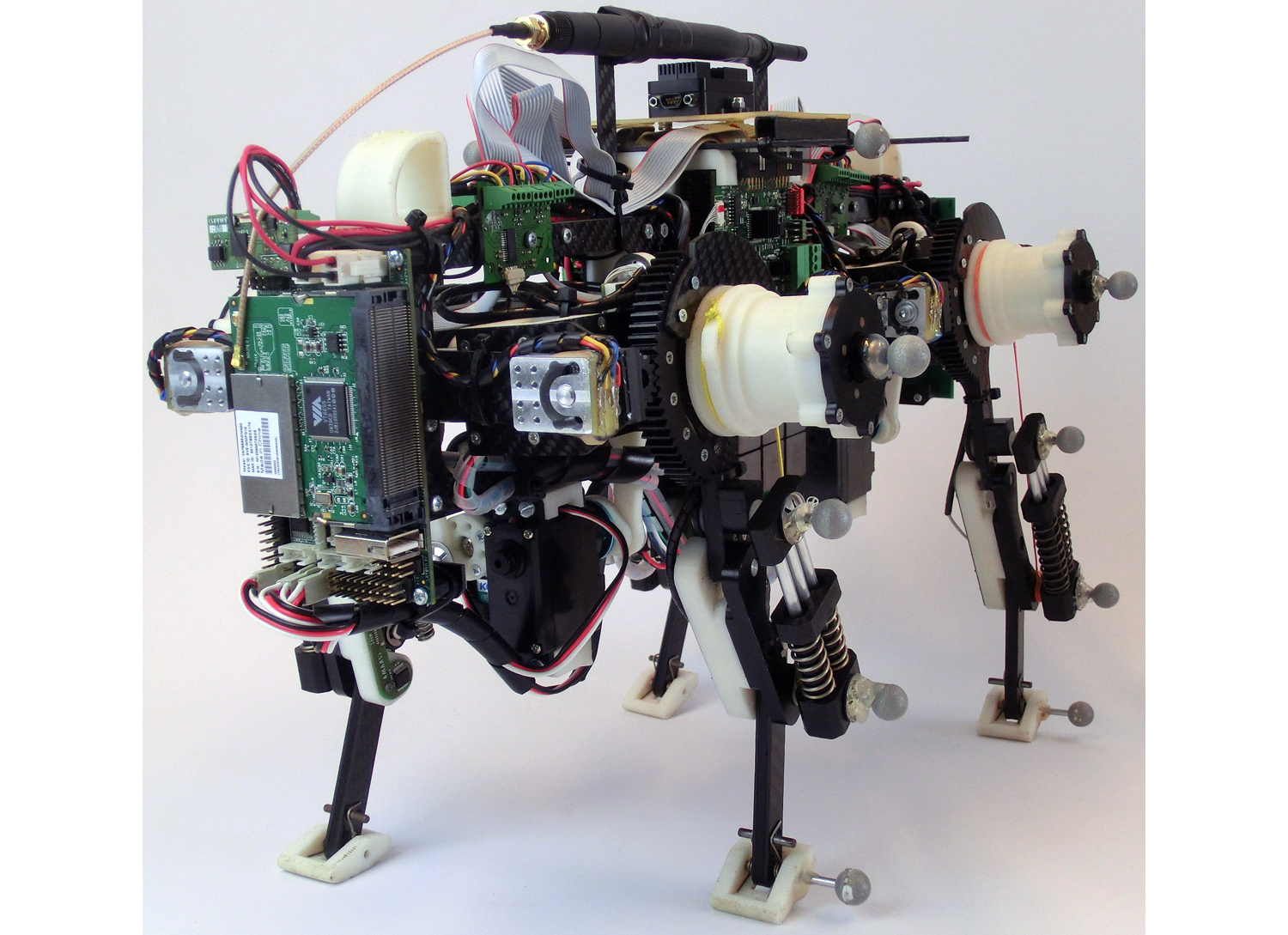
Oncilla is a larger-cat sized, quadruped robot, able to walk and trot over different substrates, and slopes.
Oncilla-robot is also an open-source project. We are aiming primarily at research with legged quadruped machines: all blueprints to reproduce mechanics, electronics, firmware, control and its simulation environment are freely available online.
Have a look the c4science open-source repository:
https://c4science.ch/tag/oncilla/
And see Oncilla-robot walking around at the EPFL campus (via Youtube)
Oncilla robot strolling around on the EPFL campus
Oncilla Webots simulation
Oncilla robot walking on flat ground
Trotting up the slope
Oncilla robot turning on the spot
The Oncilla robot research project has received funding from the European Community’s Seventh Framework Programme (AMARSi) and from the Swiss National Science Foundation through the National Centre of Competence in Research Robotics.
open-source
quadruped robot
robot
legged robot
