15 results
(View BibTeX file of all listed publications)
2023
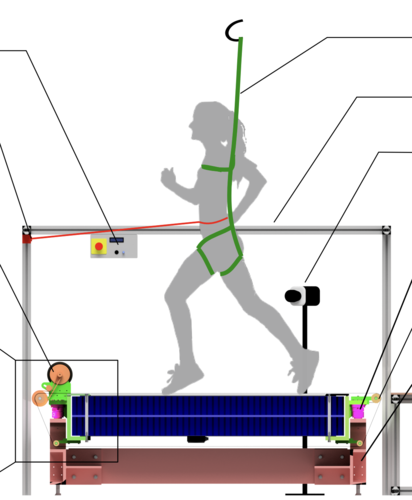
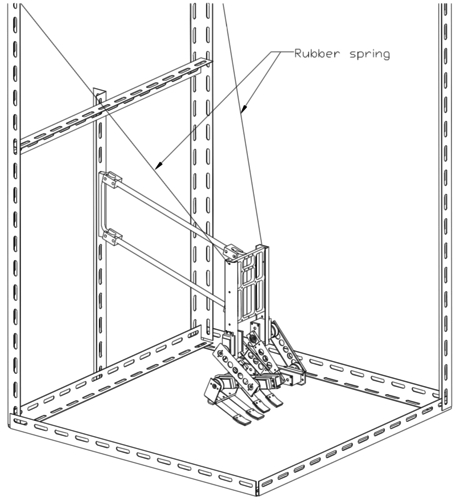
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
2023 (unpublished) Submitted
Ground reaction force sensing is one of the key
components of gait analysis in legged locomotion research. To
measure continuous force data during locomotion, we present a
novel compound instrumented treadmill design. The treadmill is
1.7 m long, with a natural frequency of 170 Hz and an adjustable
range that can be used for humans and small robots alike. Here,
we present the treadmill’s design methodology and characterize it
in its natural frequency, noise behavior and real-life performance.
Additionally, we apply an ISO 376 norm conform calibration
procedure for all spatial force directions and center of pressure
position. We achieve a force accuracy of ≤ 5.6 N for the ground
reaction forces and ≤ 13 mm in center of pressure position.
2022

Mechanical Design, Development and Testing of Bioinspired Legged Robots for Dynamic Locomotion
Eberhard Karls Universität Tübingen, Tübingen , November 2022 (phdthesis)
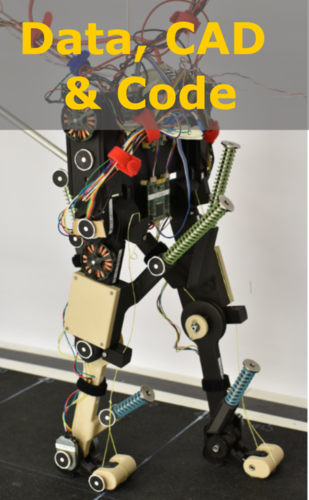
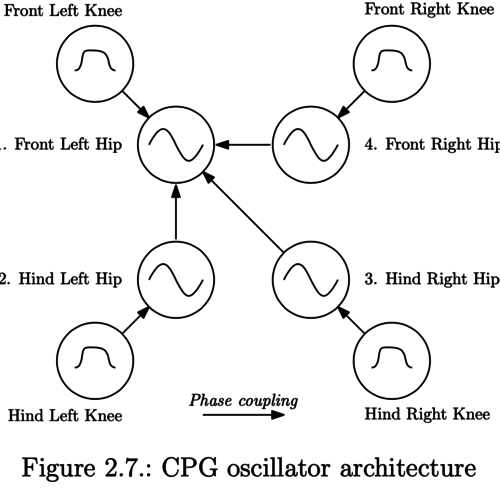
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Ruppert, F., Badri-Spröwitz, A.
Edmond, May 2022 (techreport)
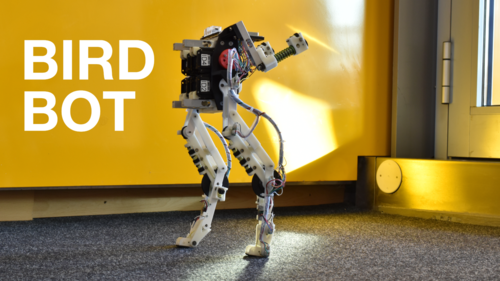
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Edmond, March 2022 (techreport)
2021
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
2020
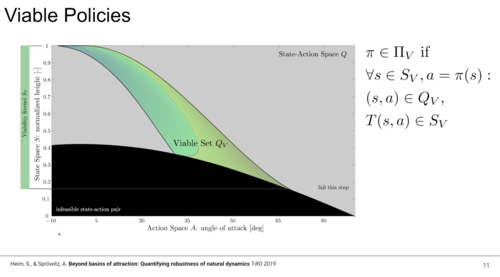
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Heim, S., Badri-Spröwitz, A.
May 2020 (talk)
Viability in State-Action Space. Connecting Morphology, Control, and Learning
Eberhard Karls Universität Tübingen, Tübingen, February 2020 (phdthesis)
2019
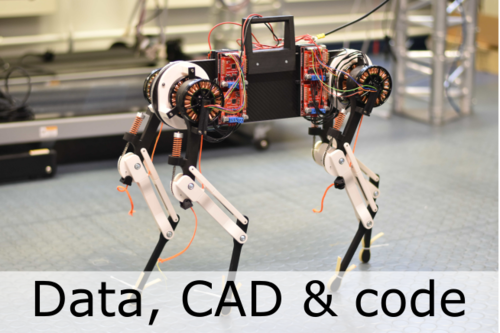
Electronics, Software and Analysis of a Bioinspired Sensorized Quadrupedal Robot
Technische Universität München, 2019 (mastersthesis)
Entwicklung und Analyse neuartiger fluidischer Aktoren mit Rollmembran
Technische Universität München, 2019 (mastersthesis)
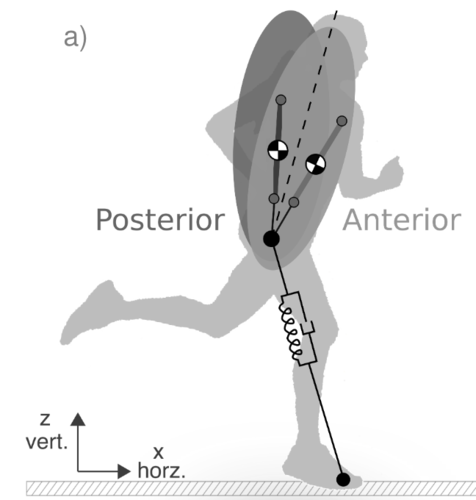
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Drama, Ö.
Dynamic Walking Conference, May 2018 (talk)
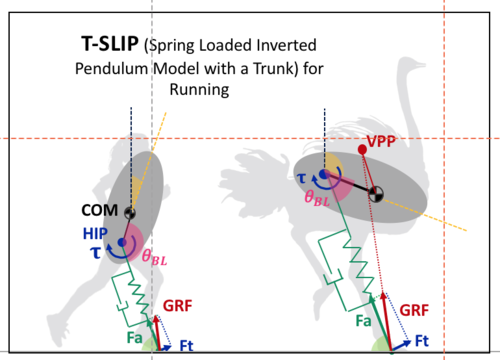
Impact of trunk orientation for dynamic bipedal locomotion
My research revolves around investigating the functional demands of bipedal running, with focus on stabilizing trunk orientation. When we think about postural stability, there are two critical questions we need to answer: What are the necessary and sufficient conditions to achieve and maintain trunk stability?
I am concentrating on how morphology affects control strategies in achieving trunk stability. In particular, I denote the trunk pitch as the predominant morphology parameter and explore the requirements it imposes on a chosen control strategy.
To analyze this, I use a spring loaded inverted pendulum model extended with a rigid trunk, which is actuated by a hip motor. The challenge for the controller design here is to have a single hip actuator to achieve two coupled tasks of moving the legs to generate motion and stabilizing the trunk. I enforce orthograde and pronograde postures and aim to identify the effect of these trunk orientations on the hip torque and ground reaction profiles for different control strategies.
2017
Evaluation of the passive dynamics of compliant legs with inertia
Györfi, B.
University of Applied Science Pforzheim, Germany, 2017 (mastersthesis)
2010
Roombots: Design and Implementation of a Modular Robot for Reconfiguration and Locomotion
Spröwitz, A.
EPFL, Lausanne, Lausanne, 2010 (phdthesis)
2005
Adaptation of Central Pattern Generators to Preexisting Mechanical Structure
Spröwitz, A.
Technische Universität Ilmenau, Ilmenau, 2005 (mastersthesis)