7 results
(View BibTeX file of all listed publications)
2022

Mechanical Design, Development and Testing of Bioinspired Legged Robots for Dynamic Locomotion
Eberhard Karls Universität Tübingen, Tübingen , November 2022 (phdthesis)
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Ruppert, F., Badri-Spröwitz, A.
Edmond, May 2022 (techreport)
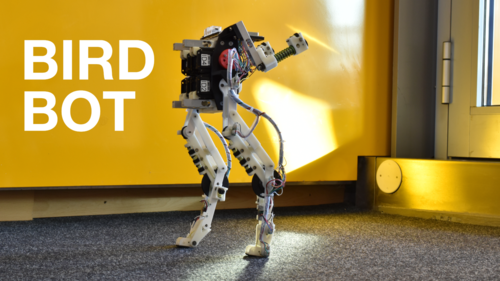
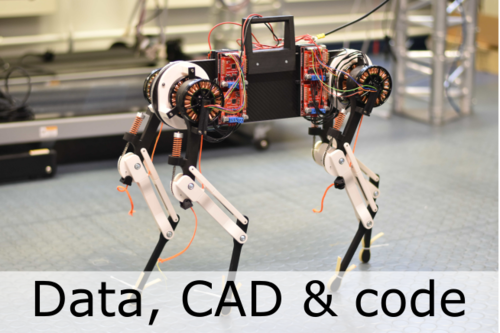
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Edmond, March 2022 (techreport)
2021
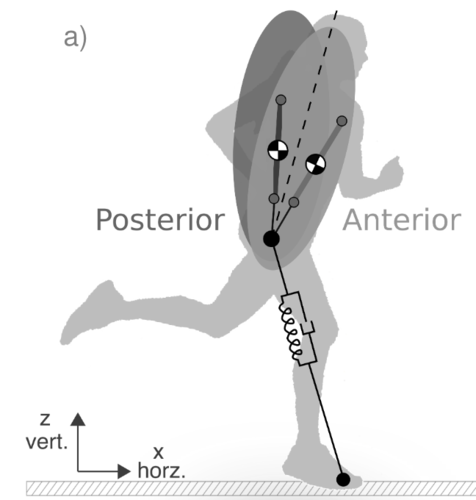
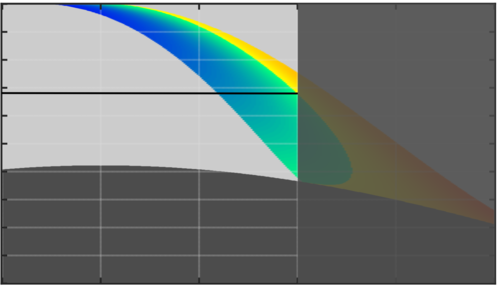
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
2020
Viability in State-Action Space. Connecting Morphology, Control, and Learning
Eberhard Karls Universität Tübingen, Tübingen, February 2020 (phdthesis)
2019

Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
Badri-Spröwitz, A.
In pages: 167-175, Springer, 2019 (incollection)
2018
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
Hochschule Harz, 2018 (thesis)