4 results
(View BibTeX file of all listed publications)
2021
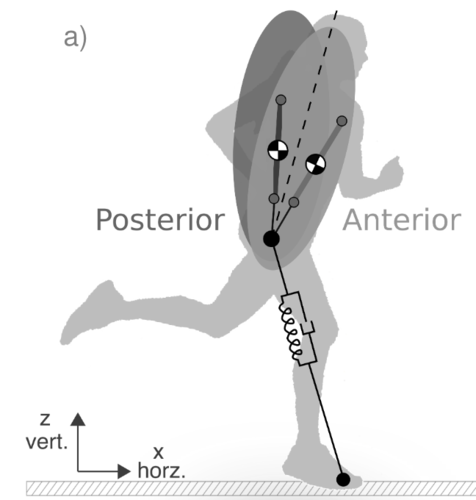
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
2020
Viability in State-Action Space. Connecting Morphology, Control, and Learning
Eberhard Karls Universität Tübingen, Tübingen, February 2020 (phdthesis)
2010
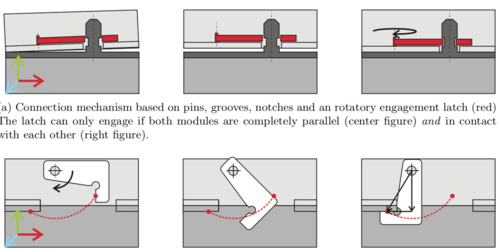
Roombots: Design and Implementation of a Modular Robot for Reconfiguration and Locomotion
Spröwitz, A.
EPFL, Lausanne, Lausanne, 2010 (phdthesis)