7 results
(View BibTeX file of all listed publications)
2021
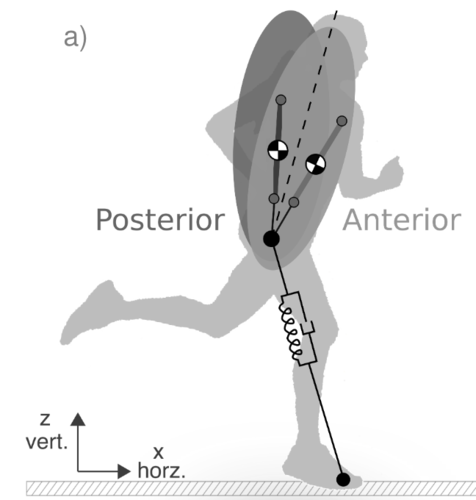
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Drama, Ö.
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
2020
Viability in State-Action Space. Connecting Morphology, Control, and Learning
Eberhard Karls Universität Tübingen, Tübingen, February 2020 (phdthesis)
2019
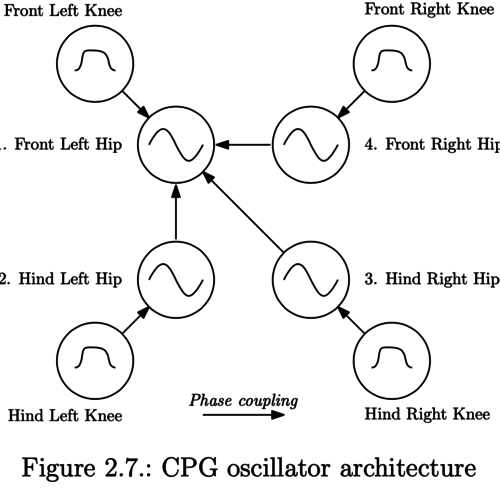
Electronics, Software and Analysis of a Bioinspired Sensorized Quadrupedal Robot
Technische Universität München, 2019 (mastersthesis)

Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
Badri-Spröwitz, A.
In pages: 167-175, Springer, 2019 (incollection)
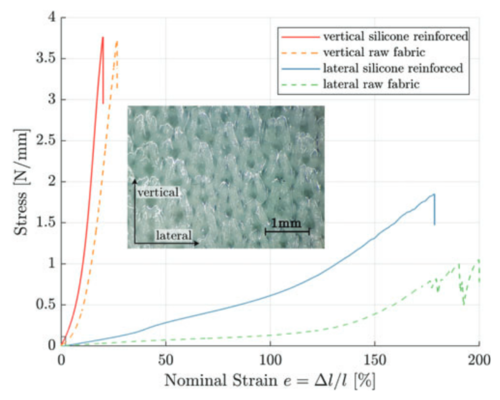
Entwicklung und Analyse neuartiger fluidischer Aktoren mit Rollmembran
Technische Universität München, 2019 (mastersthesis)

2017
Evaluation of the passive dynamics of compliant legs with inertia
Györfi, B.
University of Applied Science Pforzheim, Germany, 2017 (mastersthesis)